3. Control
The BIO Gripper G2 offers two control modes. After switching modes, the gripper needs to be re-enabled.
Mode 0: Open-close mode. (Default mode for BIO Gripper G2)
Mode 1: Position mode. It supports position, force, and speed control.
- Position: 71-150
- Speed: 0-4000
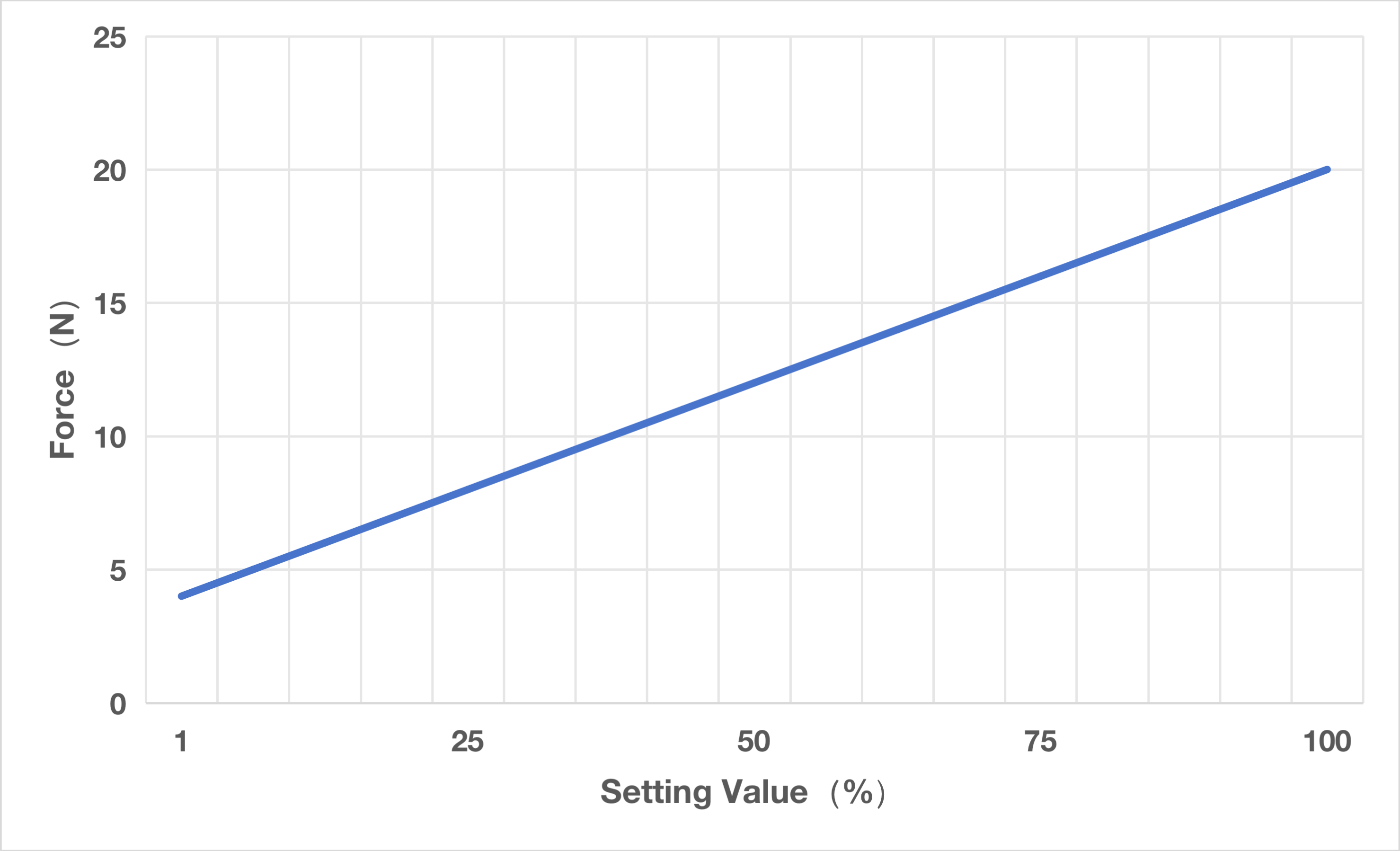
- Force: 1-100 (percentage), The force setting value is expressed as a percentage, so refer to the following chart for the corresponding actual force.
3.1 UFactory Studio Control
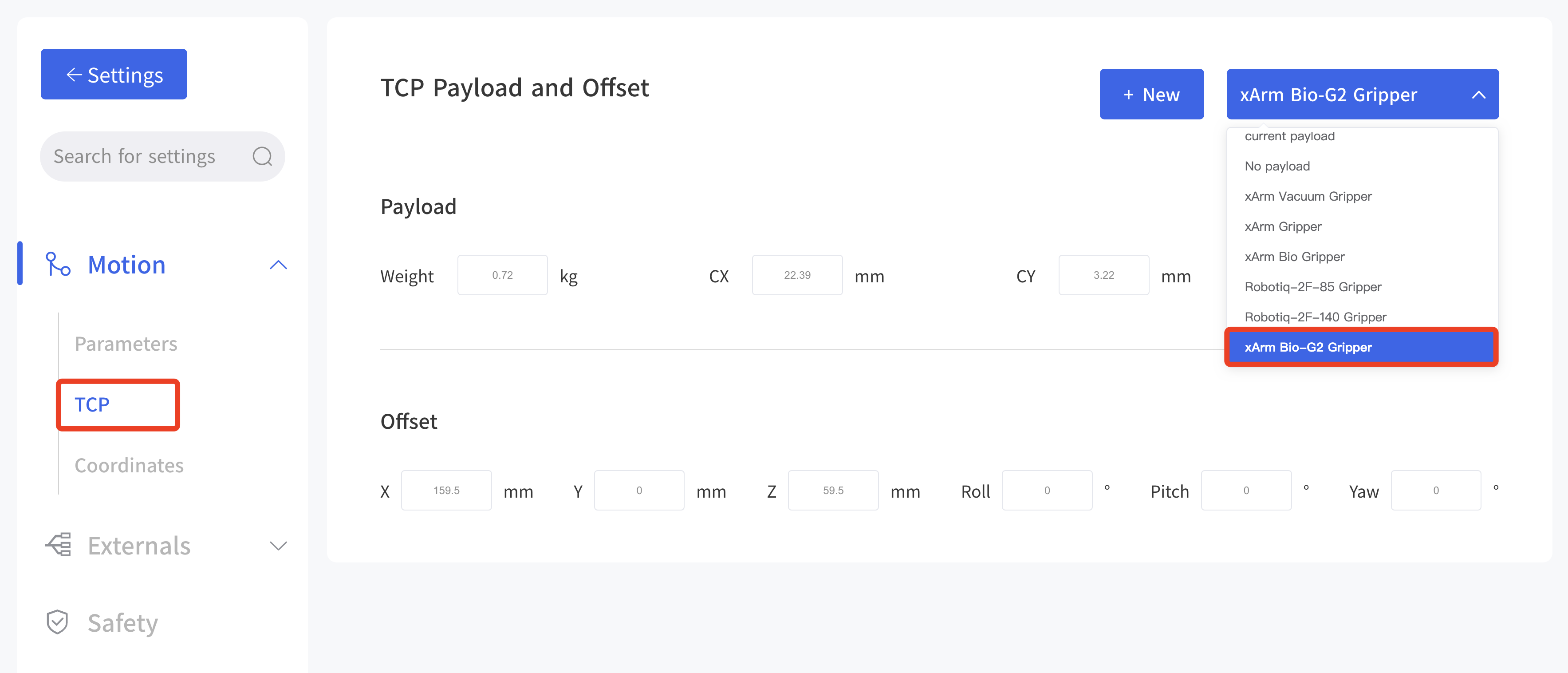
Set up BIO Gripper G2
Enter Settings-Motion-TCP. Select the end effector: xArm BIO G2 Gripper
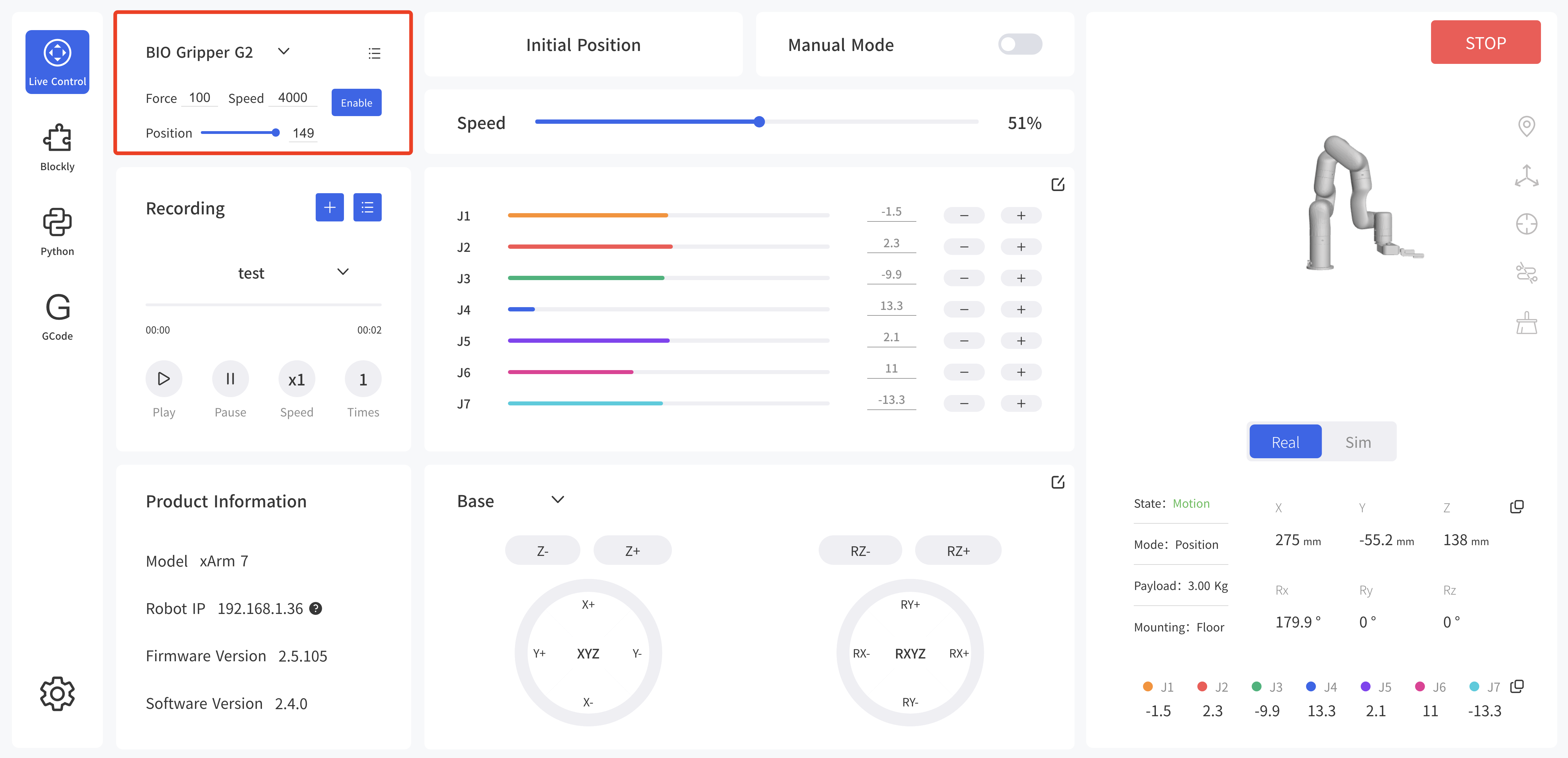
3.1.1 Live Control
Enter the live control interface and select BIO Gripper G2 for enable, speed, force and position control.
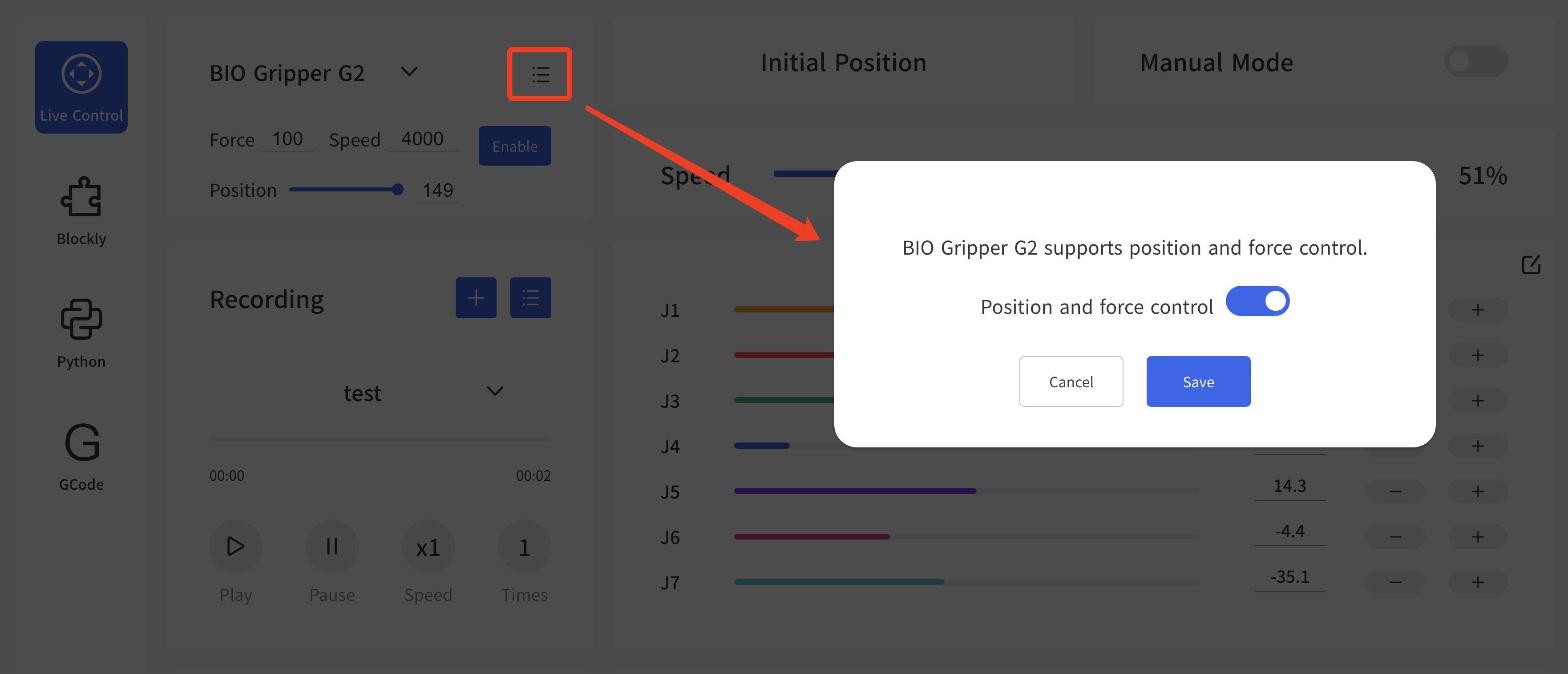
Click the upper right button to turn off the position and force control (switching mode).
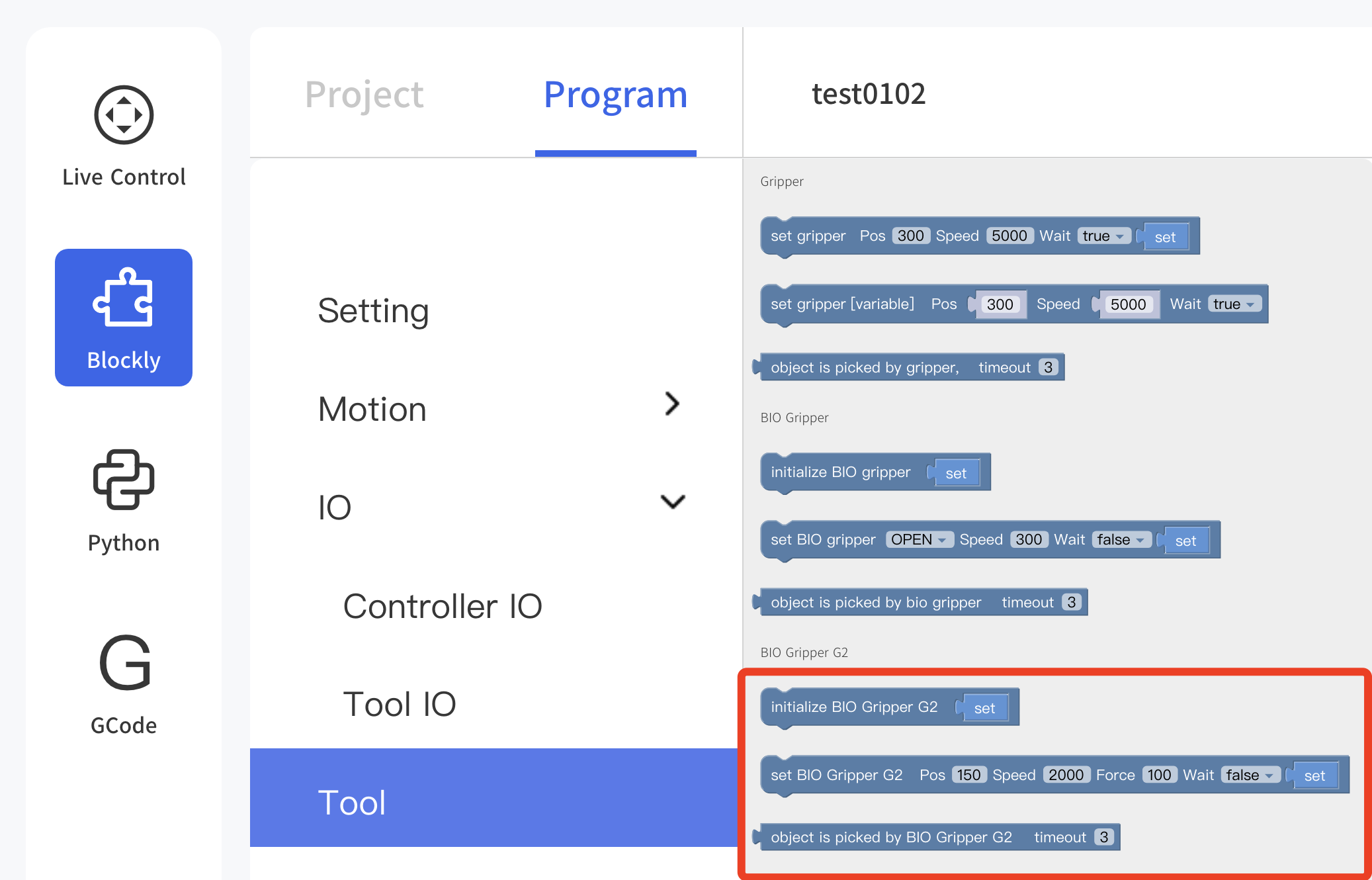
3.1.2 Blockly Control
Blockly provides 3 blocks to control the BIO Gripper G2:
- Initialize the BIO gripper G2.
- Setting up the BIO Gripper G2, parameters: position, speed, force, wait or not.
- Detect that BIO Gripper G2 has clamped an object, parameter: timeout time.
- Control the BIO Gripper G2 through Blockly programming. blockly example
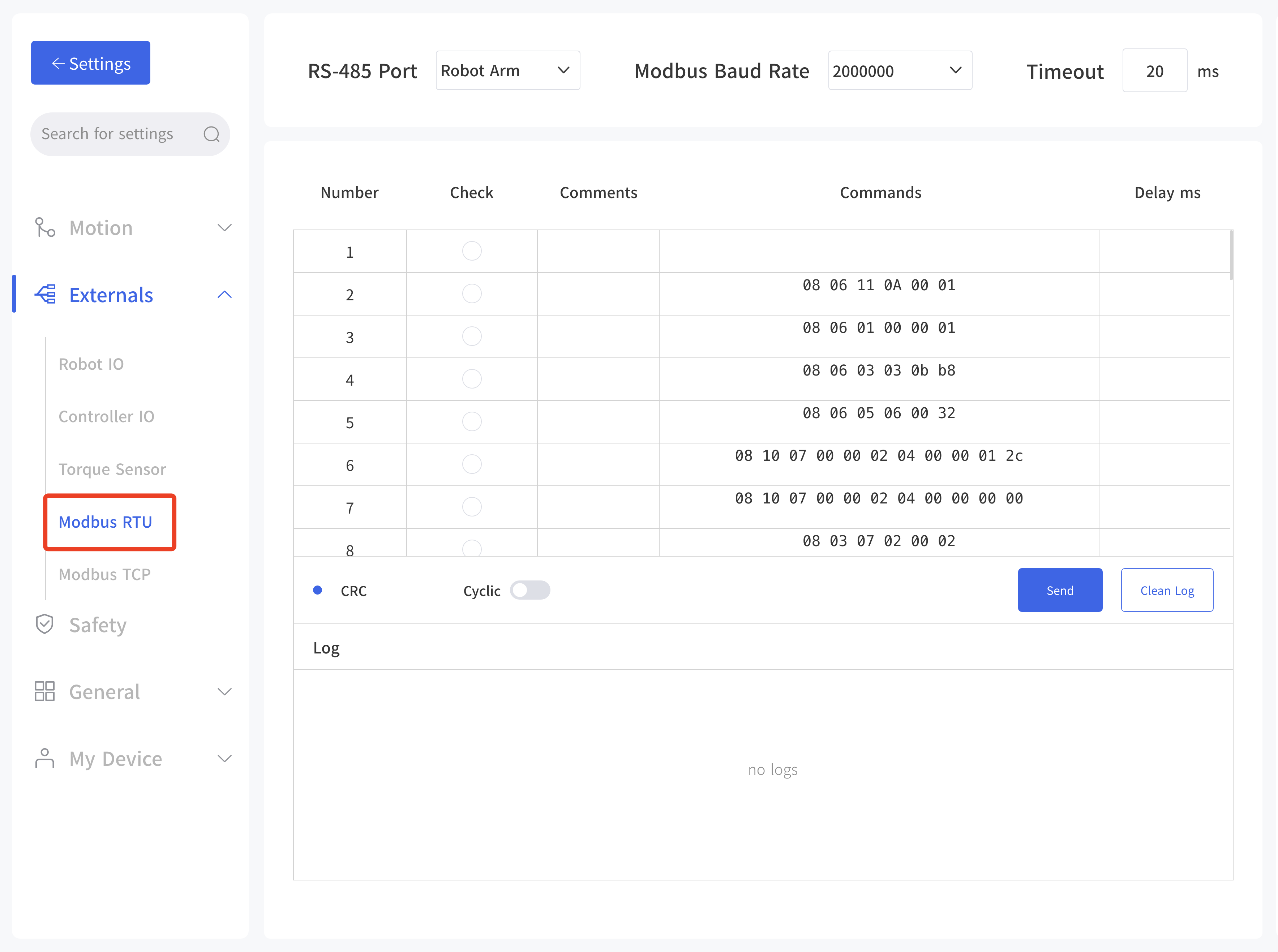
3.1.3 Modbus RTU Control
Enter to Set-Externals -Modbus RTU page and send the corresponding Modbus RTU commands for control.
For Modbus communication protocol, please refer to Modbus-RTU Communication Protocol Control
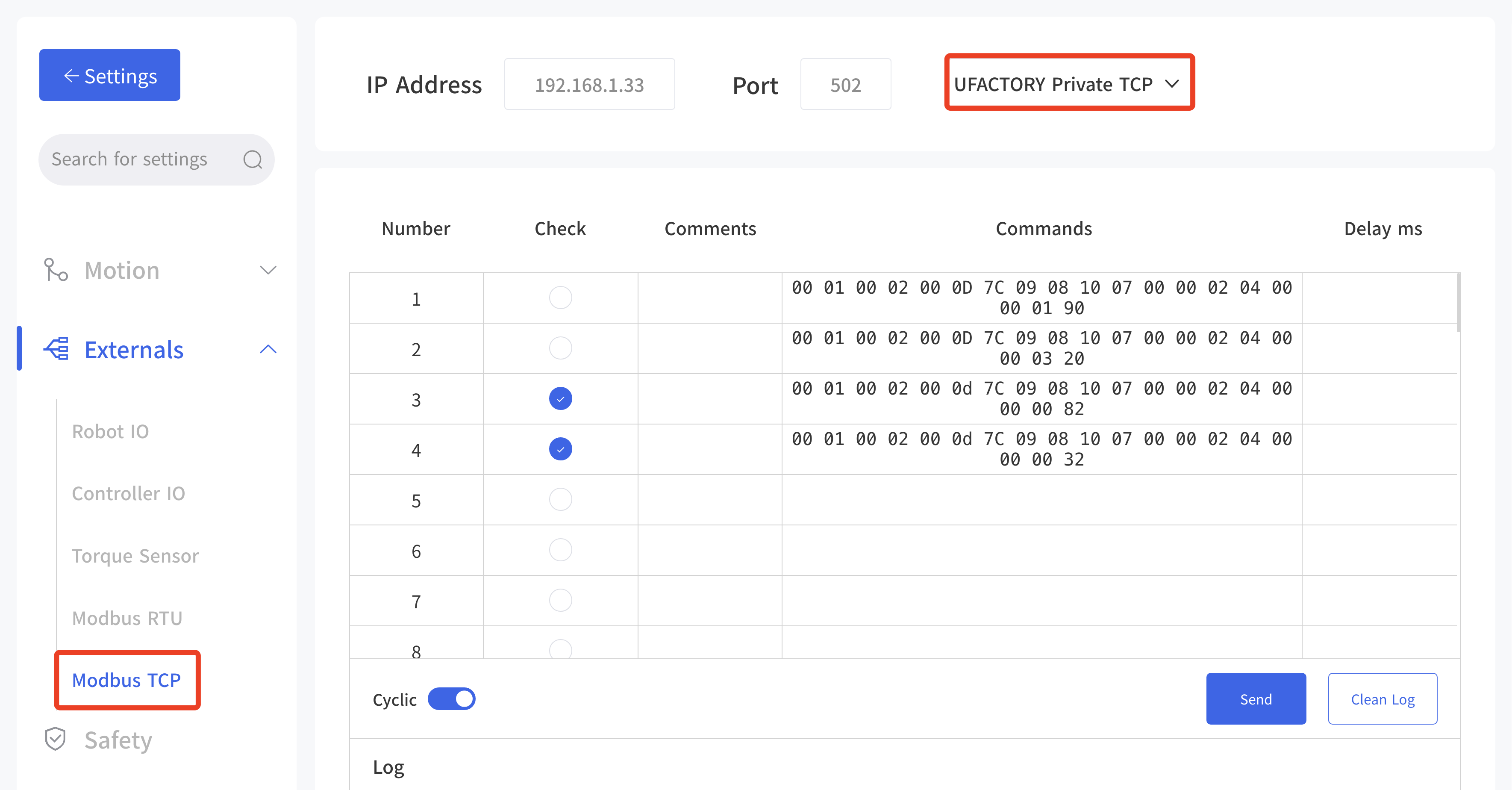
3.1.4 Private TCP Control
Enter to Set-Externals -Modbus TCP,select the "UFACTORY Private TCP",Send the appropriate private TCP commands for control
For Modbus communication protocol, please refer to UFACTORY Private TCP protocol control
3.2 Python-SDK Control
3.2.1 Mode 0:Open-Close Mode(default)
Common interfaces are listed below:
set_bio_gripper_enable :Enable BIO Gripper G2
set_bio_gripper_speed :Set BIO Gripper G2 Speed
open_bio_gripper :Open BIO Gripper G2
close_bio_gripper :Close BIO Gripper G2
For details on controlling Gripper with Python-SDK, please refer to the link below:
3.2.2 Mode 1:Position Mode
Common interfaces are listed below:set_bio_gripper_enable :Enable BIO Gripper G2
set_bio_gripper_control_mode(mode=1) :Switch to Position Mode
set_bio_gripper_position :Controls the position, force and speed of the BIO Gripper G2
Python Example:
import os
import sys
import time
sys.path.append(os.path.join(os.path.dirname(__file__), '../../..'))
from xarm.wrapper import XArmAPI
arm = XArmAPI('192.168.1.204')
arm.motion_enable(True)
arm.clean_error()
arm.set_mode(0)
arm.set_state(0)
time.sleep(1)
code = arm.set_bio_gripper_control_mode(mode=1)
print('set_bio_gripper_mode,code={}'.format(code))
code = arm.set_bio_gripper_enable(True)
print('set_bio_gipper_enable,code={}'.format(code))
while True:
code = arm.set_bio_gripper_position(150, speed=3000, force=50)
print('set_bio_gripper_position,code={}'.format(code))
time.sleep(0.2)
code = arm.set_bio_gripper_position(71, speed=3000, force=100)
print('set_bio_gripper_position,code={}'.format(code))
time.sleep(0.2)