3. 控制方式
BIO机械爪G2提供两种控制模式。切换模式后,需重新使能机械爪。
模式0: 开合模式。(BIO机械爪G2默认的模式)
模式1: 位置模式。支持传入位置,力,速度。
- 位置:71-150
- 速度:0-4000
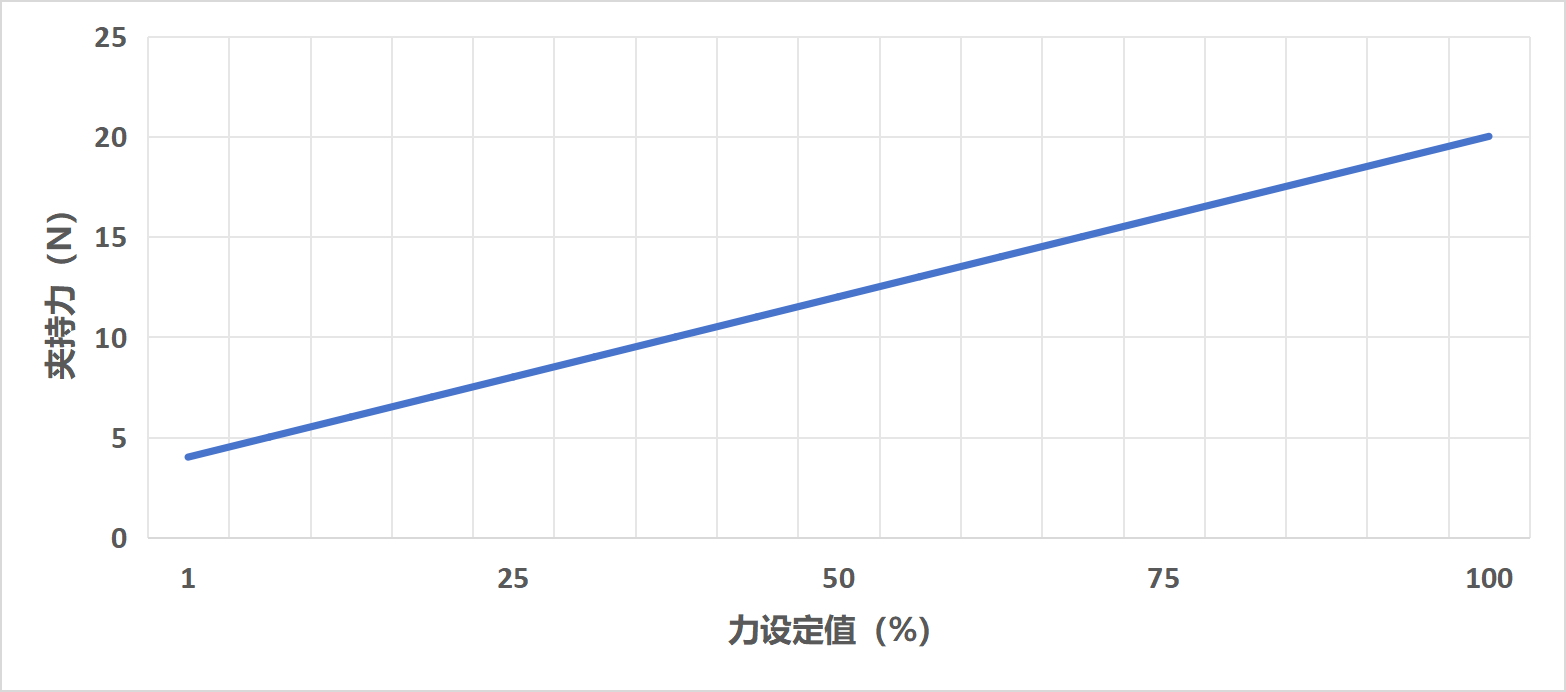
- 力:1-100(百分比)。 力设定值以百分比表示,对应实际力的大小参考下图。
3.1 用UFactory Studio控制
设置BIO机械爪G2
进入设置 - 运动参数 - TCP设置,选择BIO-G2机械爪。 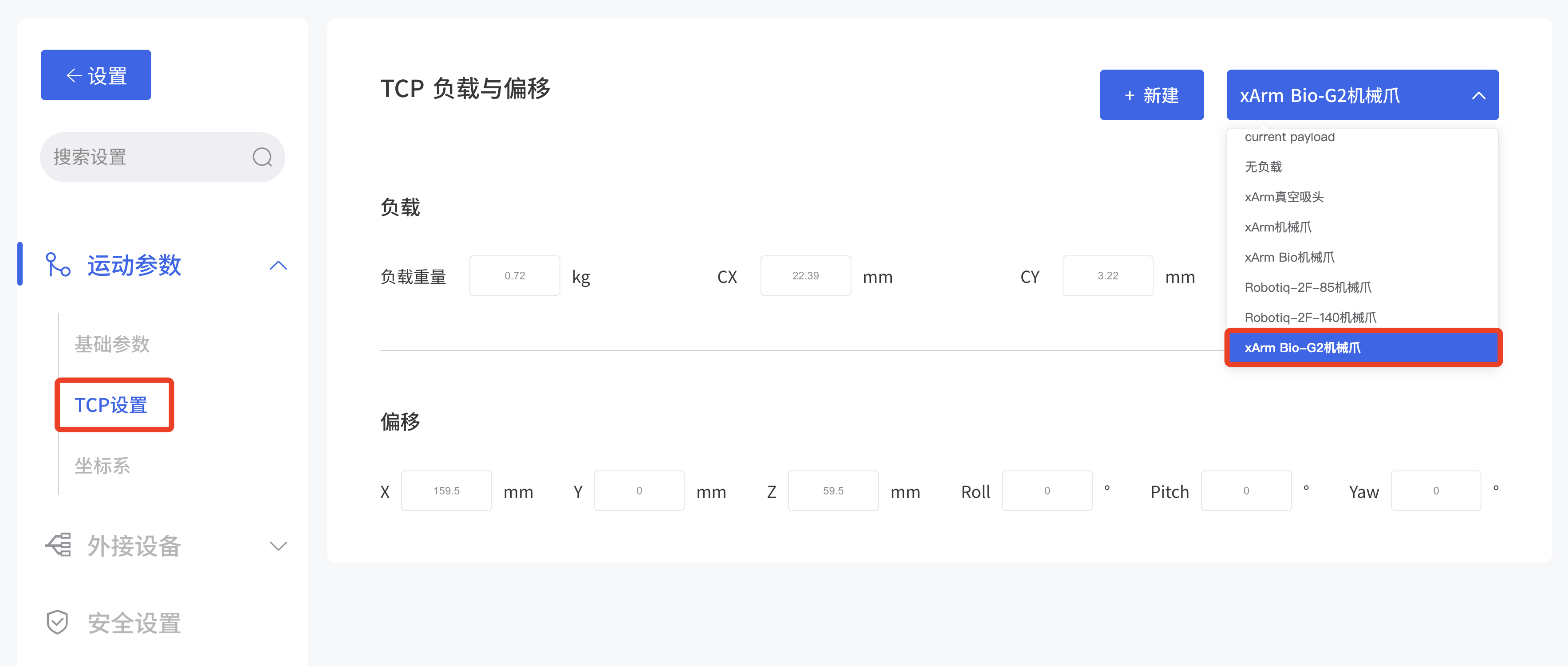
3.1.1 实时控制界面控制
进入实时控制界面,选择BIO机械爪G2,可进行使能,速度,力,位置控制。
点击右上角按钮,可关闭位置与力控制(切换模式)。 

3.1.2 Blockly控制
Blockly提供3个块控制BIO机械爪G2:
- 初始化BIO机械爪G2
- 设置BIO机械爪G2, 参数:位置,速度,力度,是否等待
- 检测到BIO机械爪G2已经夹住物体, 参数:超时时间

- 通过blockly编程来控制BIO机械爪G2
blockly示例
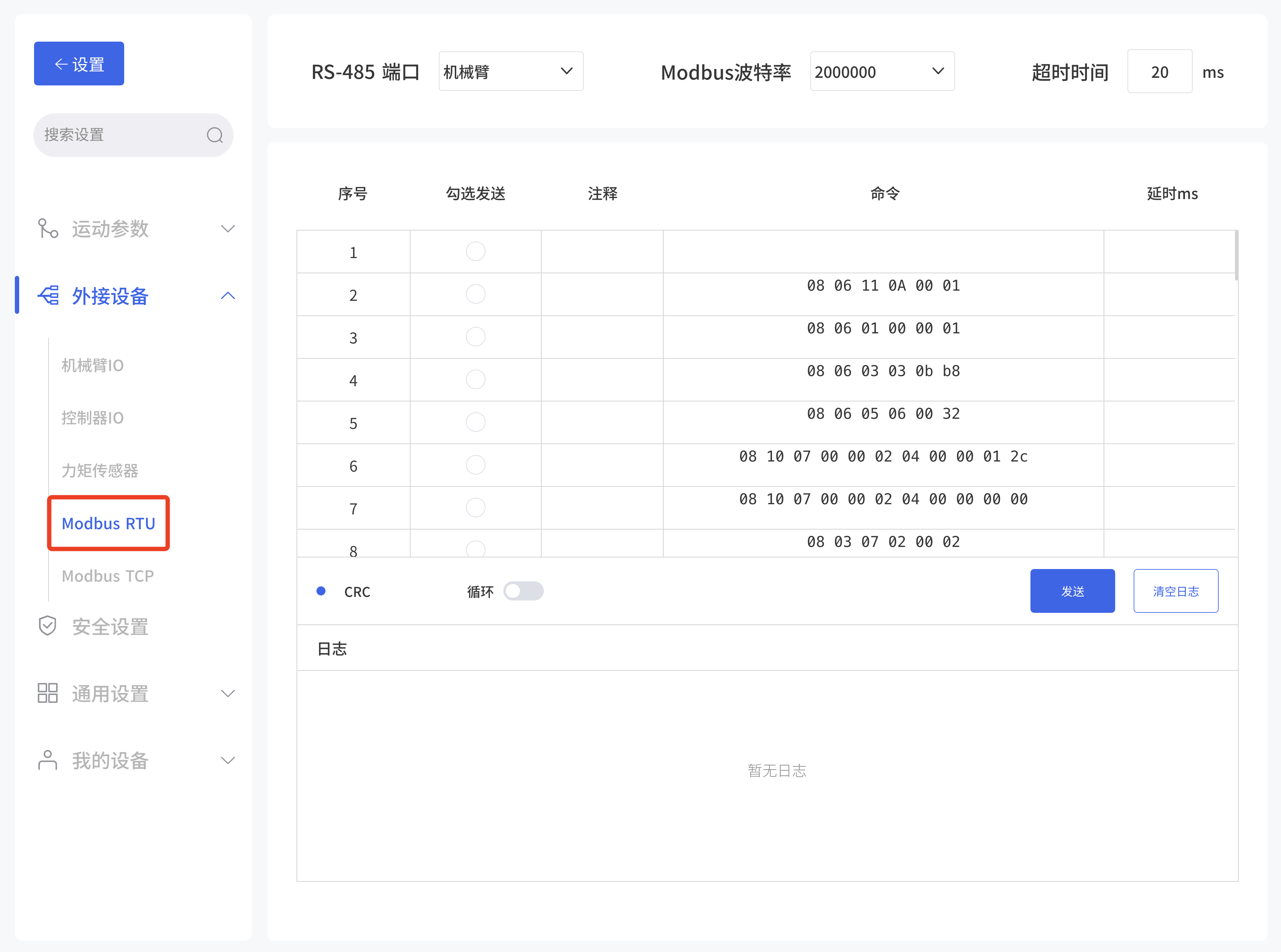
3.1.3 Modbus RTU控制
进入设置-外接设备-Modbus RTU页面,发送相应的Modbus RTU指令进行控制。
Modbus通讯协议请参考Modbus RTU通讯协议控制
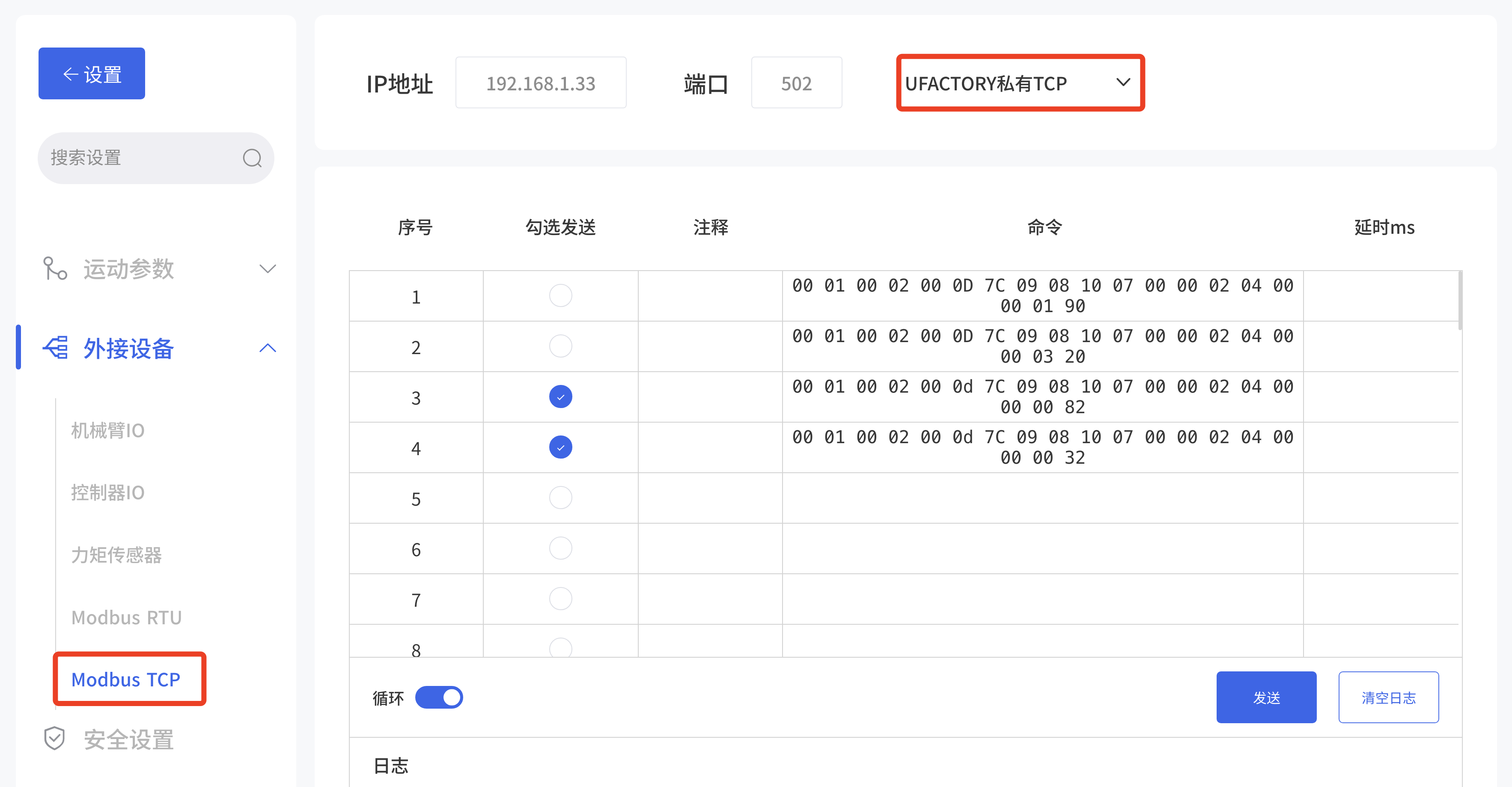
3.1.4 UFACTORY私有协议控制
进入设置-外接设备-Modbus TCP页面,选择'UFACTORY私有TCP',发送相应的私有TCP指令进行控制。
Modbus通讯协议请参考UFACTORY私有协议控制
3.2 用Python-SDK控制
3.2.1 模式0:开合模式(默认)
常用接口如下:set_bio_gripper_enable :使能BIO机械爪G2set_bio_gripper_speed :设置BIO机械爪G2速度open_bio_gripper :打开BIO机械爪close_bio_gripper :关闭BIO机械爪
Python示例:5009-set_bio_gripper.py
3.2.2 模式1:位置模式
常用接口如下:(Python SDK > 1.14.7)set_bio_gripper_enable :使能BIO机械爪G2set_bio_gripper_control_mode(mode=1) :切换为位置模式set_bio_gripper_position :控制BIO机械爪G2的位置,力,速度
Python示例:
python
import os
import sys
import time
sys.path.append(os.path.join(os.path.dirname(__file__), '../../..'))
from xarm.wrapper import XArmAPI
arm = XArmAPI('192.168.1.204')
arm.motion_enable(True)
arm.clean_error()
arm.set_mode(0)
arm.set_state(0)
time.sleep(1)
code = arm.set_bio_gripper_control_mode(mode=1)
print('set_bio_gripper_mode,code={}'.format(code))
code = arm.set_bio_gripper_enable(True)
print('set_bio_gipper_enable,code={}'.format(code))
while True:
code = arm.set_bio_gripper_position(150, speed=3000, force=50)
print('set_bio_gripper_position,code={}'.format(code))
time.sleep(0.2)
code = arm.set_bio_gripper_position(71, speed=3000, force=100)
print('set_bio_gripper_position,code={}'.format(code))
time.sleep(0.2)