2.安装
以下小节将指导您完成xArm真空吸头的安装和常规设置。
(1)发货清单
(2)机械安装部分
(3)电气设置部分
警告
安装之前:
阅读并理解与xArm真空吸头有关的安全说明。
根据发货清单和订单验证包裹。
备有需求中列出的所需零件。
安装时:
满足环境条件。
在牢固地固定住xArm真空吸头并清除危险区域之前,请勿操作真空吸头或打开电源。
2.1 发货清单
2.1.1通用套件
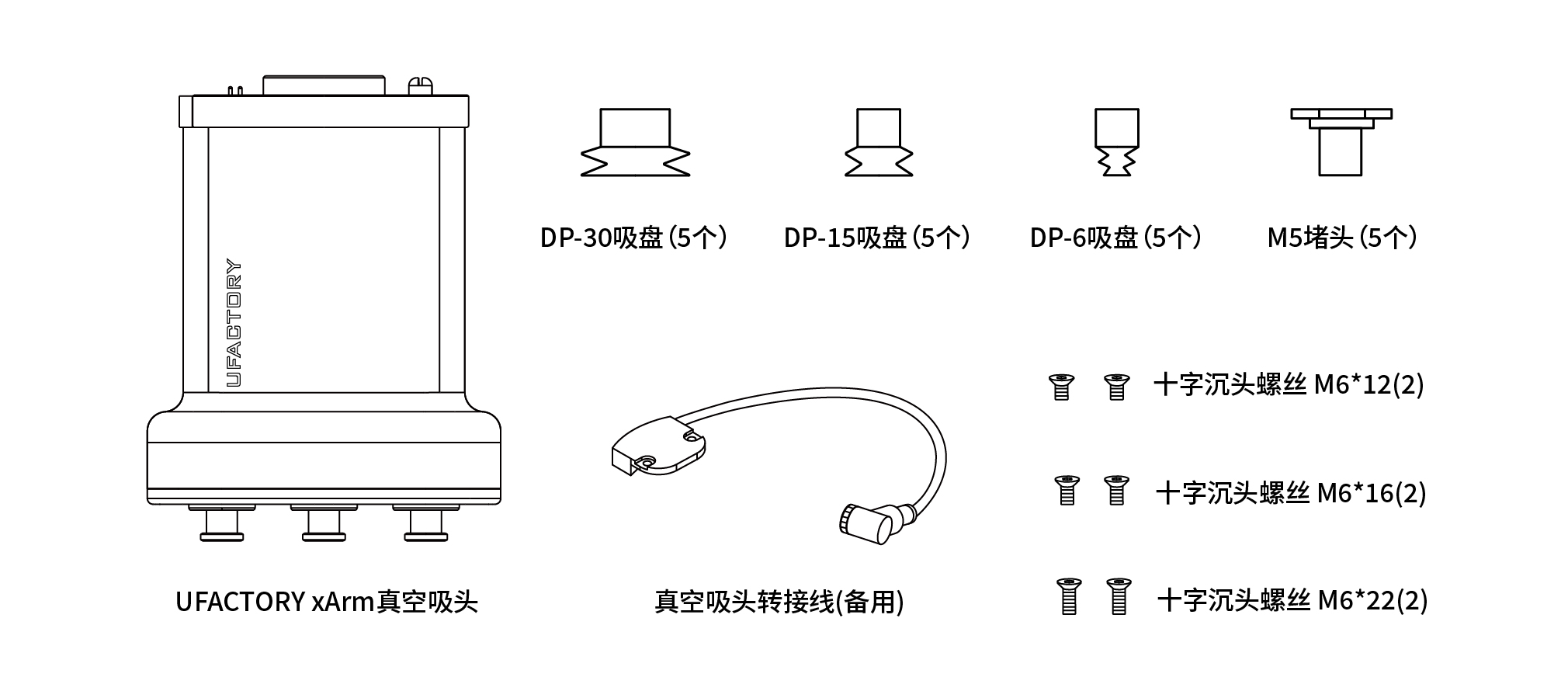
xArm真空吸头套件通常包括以下物品:
xArm真空吸头
真空吸头转接线(备用)
十字沉头螺丝M6*12(2个)
十字沉头螺丝M6*16(2个)
十字沉头螺丝M6*22(2个)
M5堵头(5个)
DP-6吸盘(5个)
DP-15吸盘(5个)
DP-30吸盘(5个)
2.2机械安装
2.2.1 安装准备
1.机械臂运动到安全位置(避免碰到机械臂安装表面或者其他设备 );
2.机械臂断电(按下控制器急停按钮);
2.2.2 安装方式
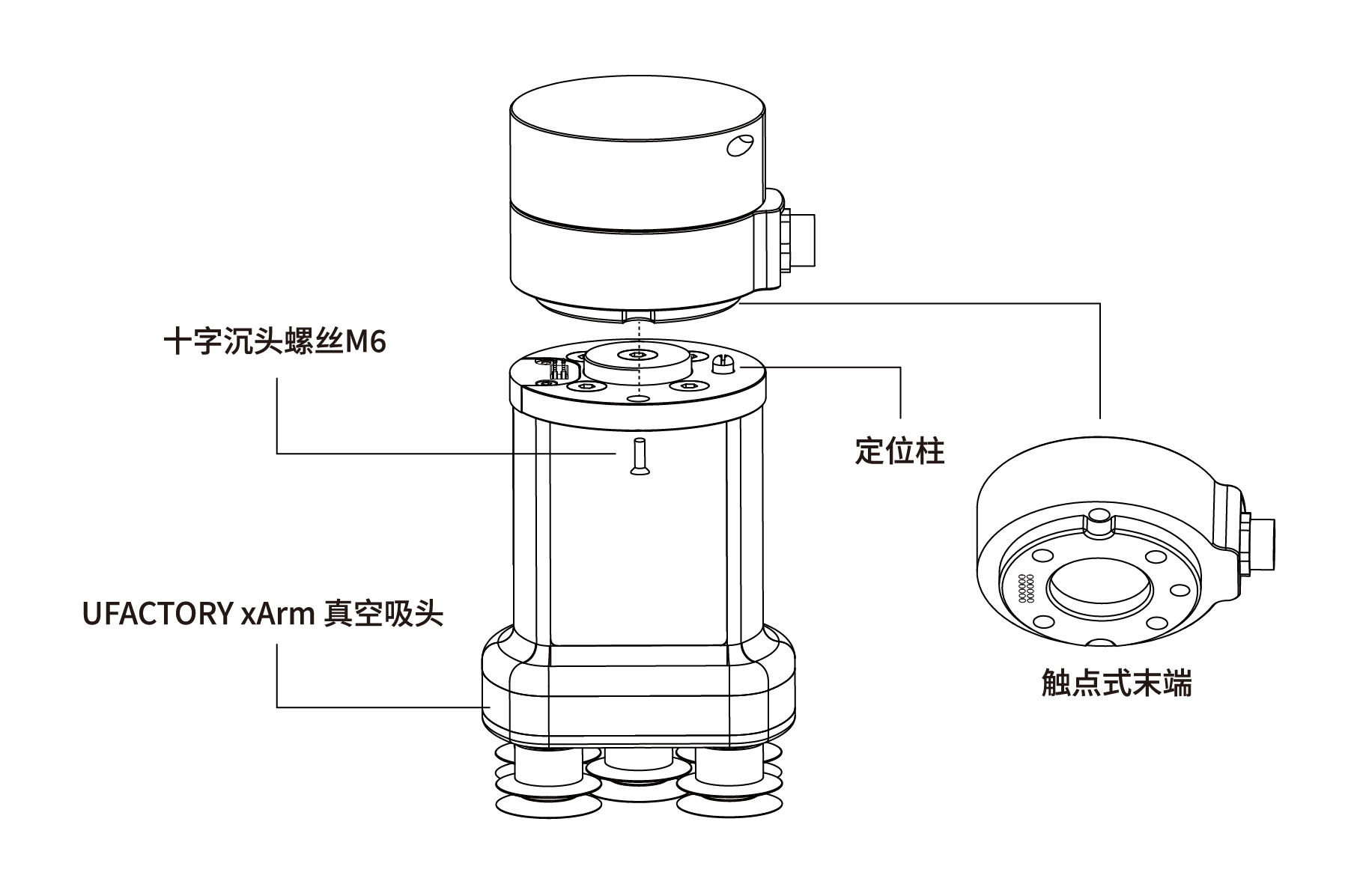
- 若手臂末端是触点式:(UF850,XX1305)
用2颗M6 螺丝把真空吸头固定在机械臂末端
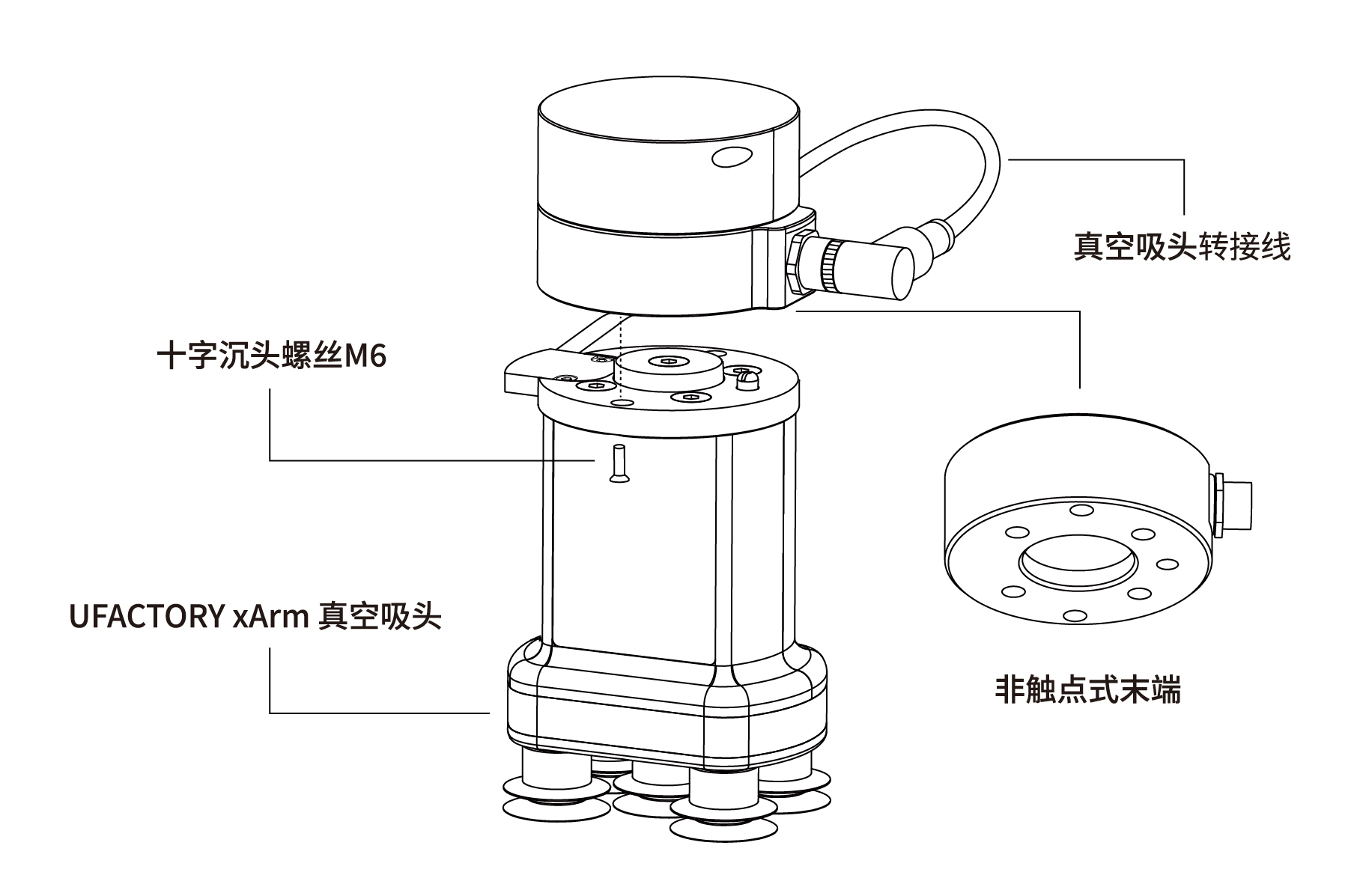
- 若手臂末端不是触点式:
1)请将真空吸头法兰面两颗螺丝拧开,取下黑色盖板,替换银色盖板和真空吸头通讯线;
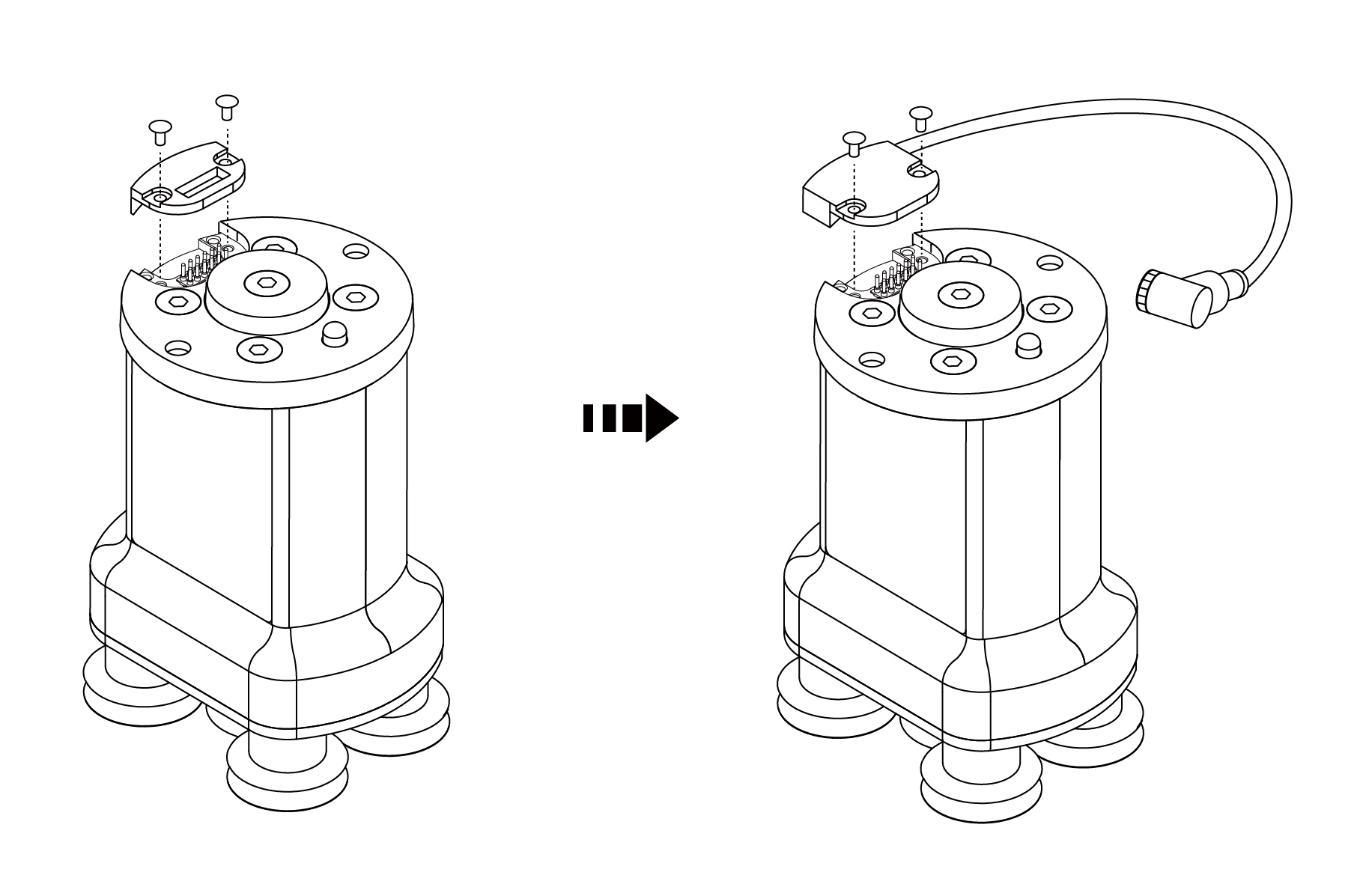
2)用2颗M6 螺丝把真空吸头固定在机械臂末端;
3)连接真空吸头通讯线到手臂末端;
注意:
- 接通真空吸头时一定要使机械臂断电,急停开关处于按下状态,机械臂电源指示灯熄灭,避免热插拔引起机械臂故障;
- 因真空吸头连接线长度限制,真空吸头接口与末端接口需在相同的方向;
- 用连接线接通真空吸头跟机械臂时务必对齐两端接口的定位孔,连接线的公针较为纤细,避免在拆装时使公针弯曲。
- 切勿用手直接拔取吸盘顶部,此操作会损坏吸盘
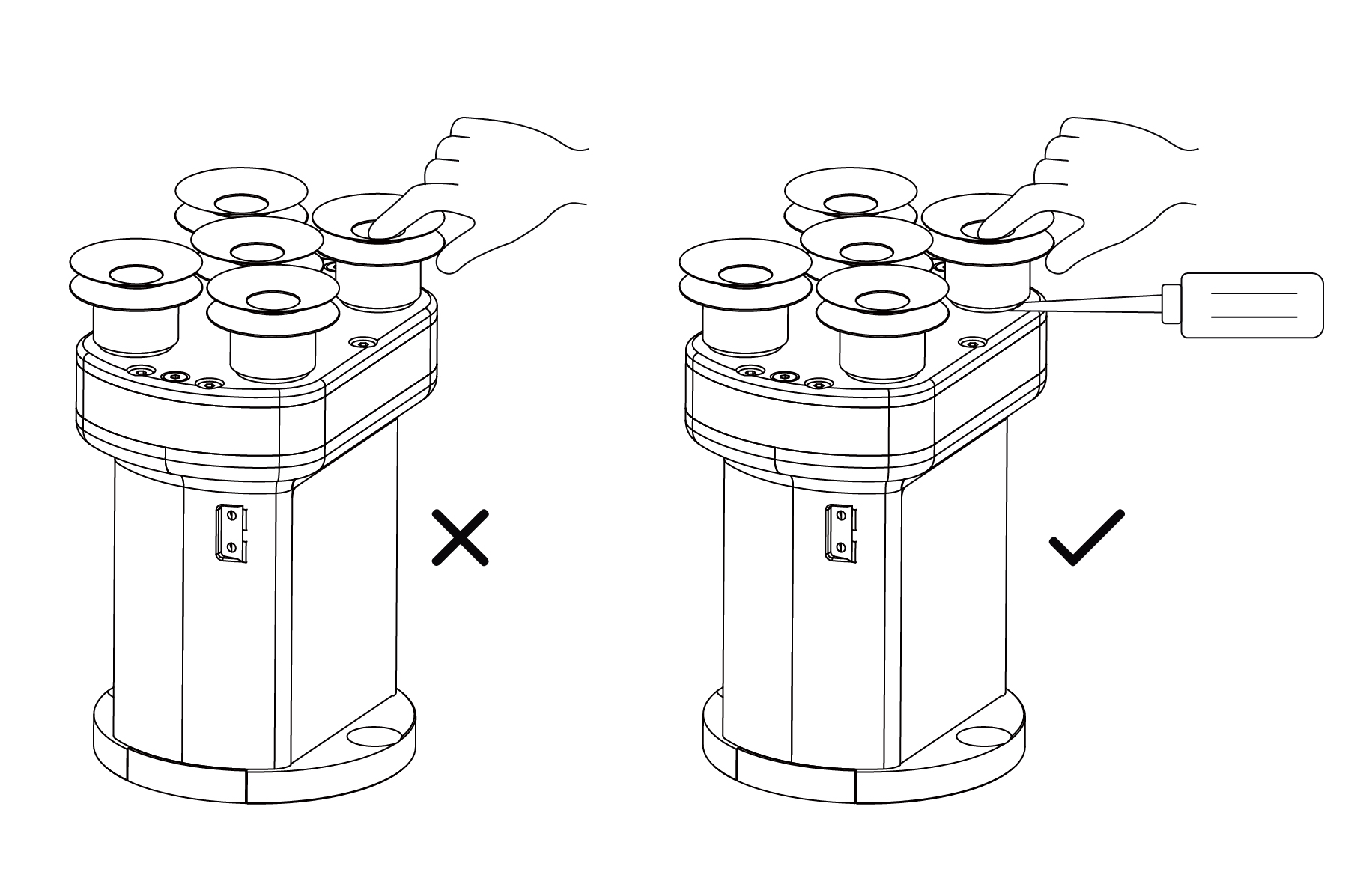
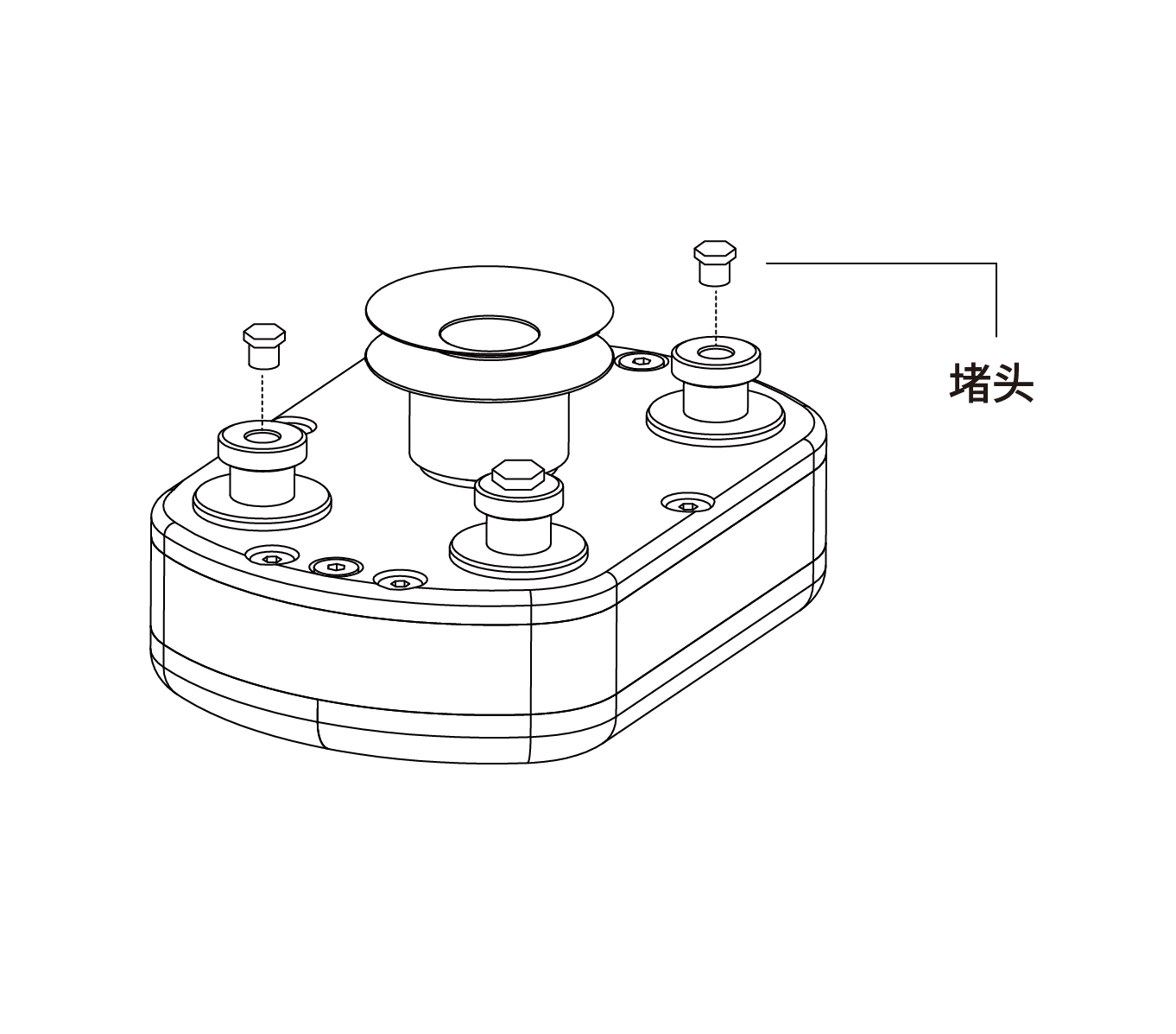
- 请使用扳手将不需要用到的吸嘴用M5 堵头拧紧,保证气密性
2.2.3 电气设置
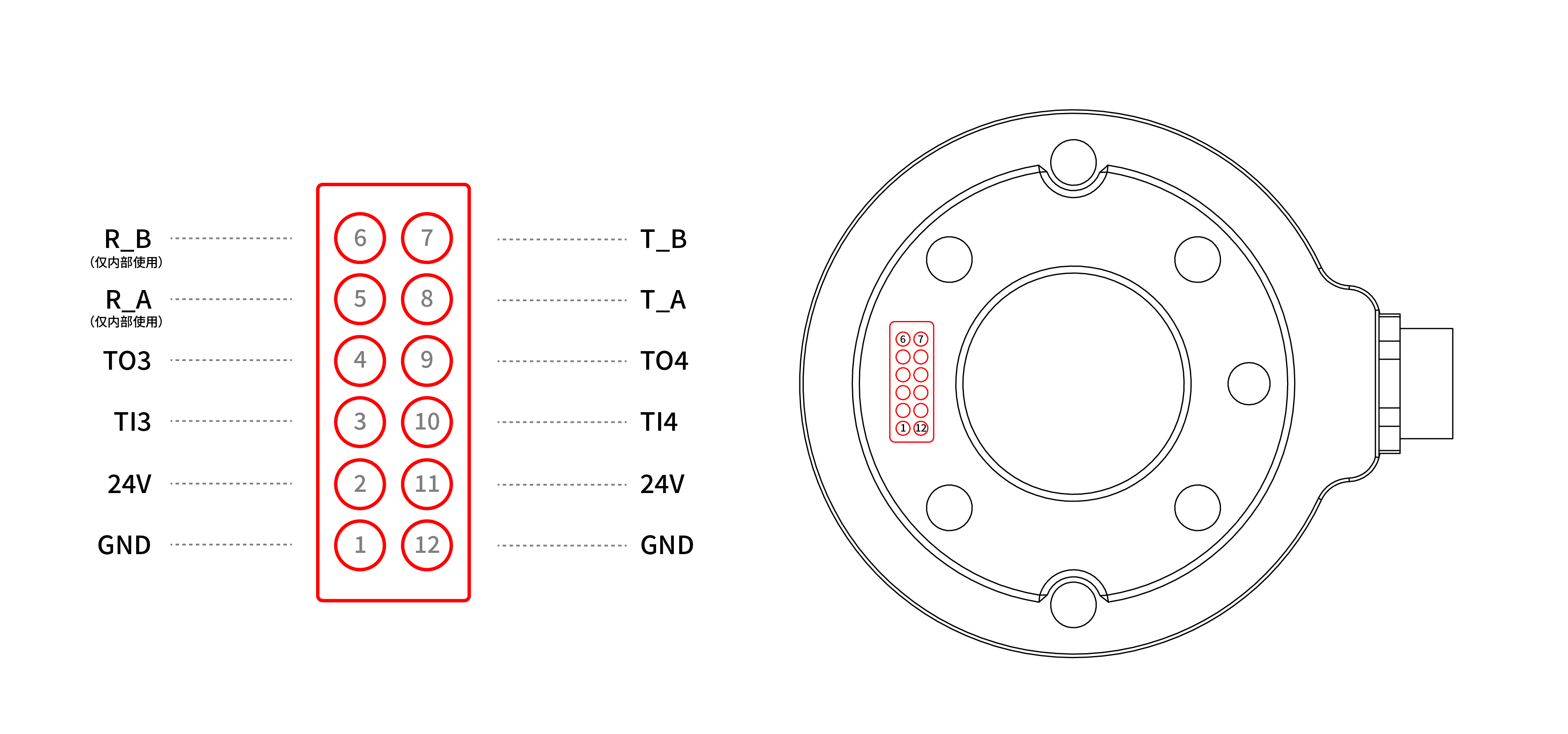
- 触点式接口
通过机械臂末端24v直流供电和IO控制,具体引脚功能请参考下图
- 非触点式接口
通过单根设备电缆与 xArm 机械臂建立电源和通信。设备电缆为真空吸头提供 24V 电源,并实现了与机械臂控制器的 IO 通信. 具体引脚功能请参考下图
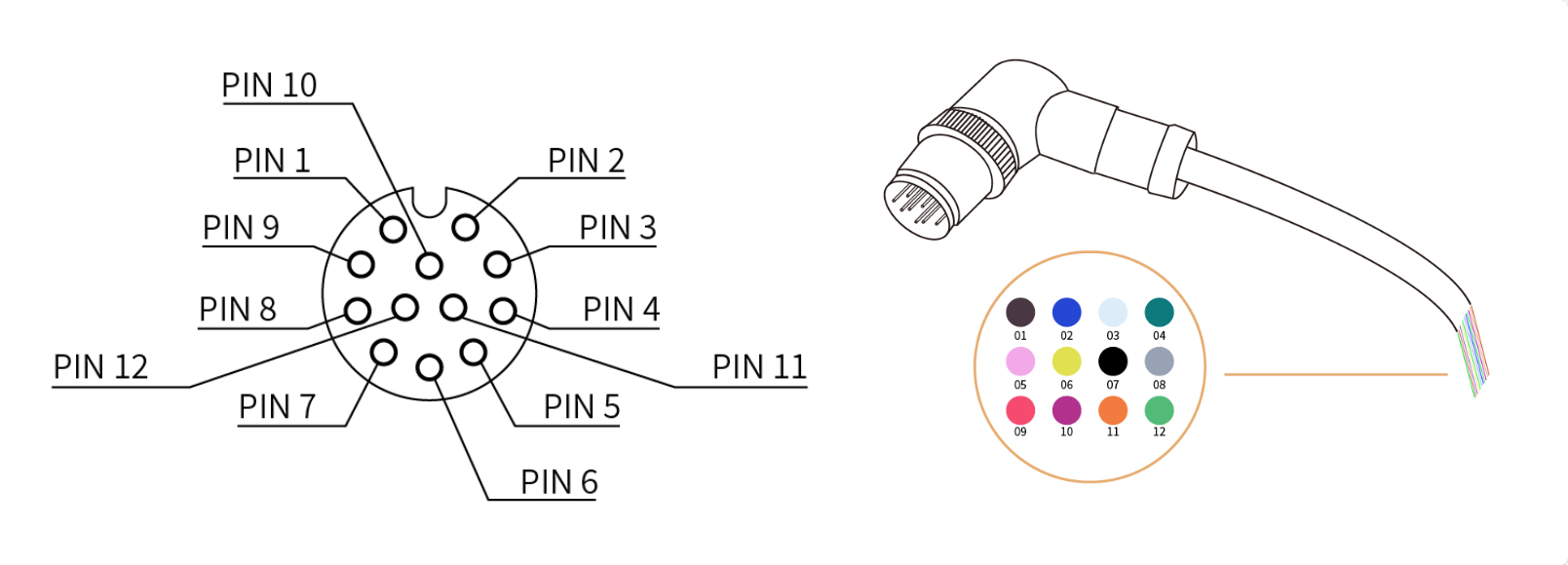
| 线序 | 颜色 | 信号 |
|---|---|---|
| 1 | 棕 | +24V(电源) |
| 2 | 蓝 | +24V(电源) |
| 3 | 白 | 0V (GND) |
| 4 | 绿 | 0V (GND) |
| 5 | 粉 | 用户485-A |
| 6 | 黄 | 用户485-B |
| 7 | 黑 | 工具输出 0 (TO0) |
| 8 | 灰 | 工具输出 1 (TO1) |
| 9 | 红 | 工具输入 0 (TI0) |
| 10 | 紫 | 工具输入 1 (TI1) |
| 11 | 橙 | 模拟输入 0 (AI0) |
| 12 | 浅绿 | 模拟输入 1 (AI1) |
警告:
请断开机械臂电源后,再连接真空吸头和机械臂