3.控制方式
3.1UFACTORY Studio控制
- 设置xArm真空吸头
进入设置-运动参数-TCP设置
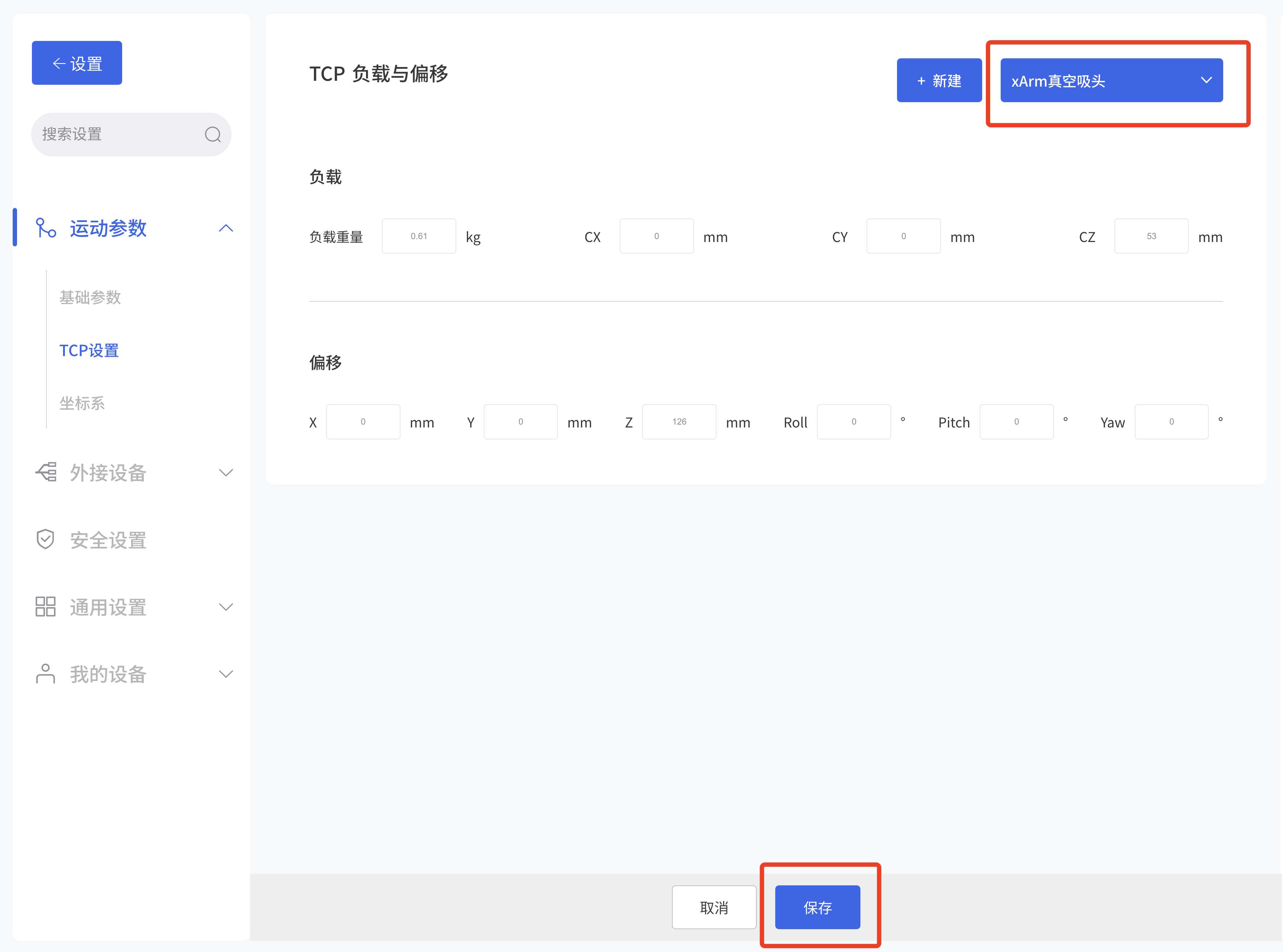
安装真空吸头后,设置Tcp负载和偏移,选择xarm真空吸头,并保存.当真空吸头吸取物体后,其重量发生变化,则需要设置新的TCP负载
- 控制xArm真空吸头
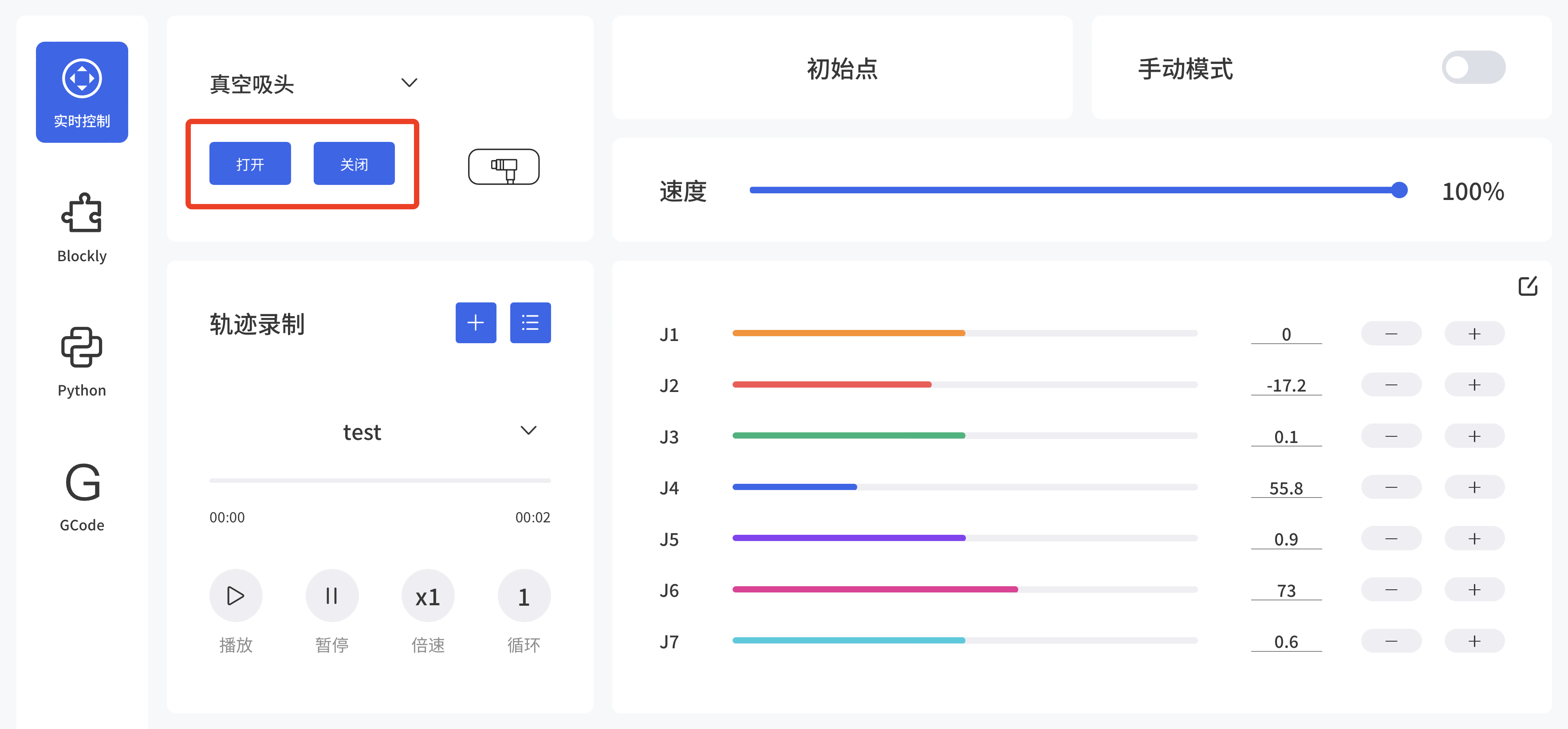
- 在实时控制界面控制xArm真空吸头
控制方法:
在实时控制界面选择真空吸头,首先选择连接方式,然后通过点击打开/关闭按钮,来控制真空吸头的打开和关闭。

- 通过Blockly编程来控制xArm真空吸头
在blockly模块中找到示例文件1008_xArm_Vacuum_Gripper
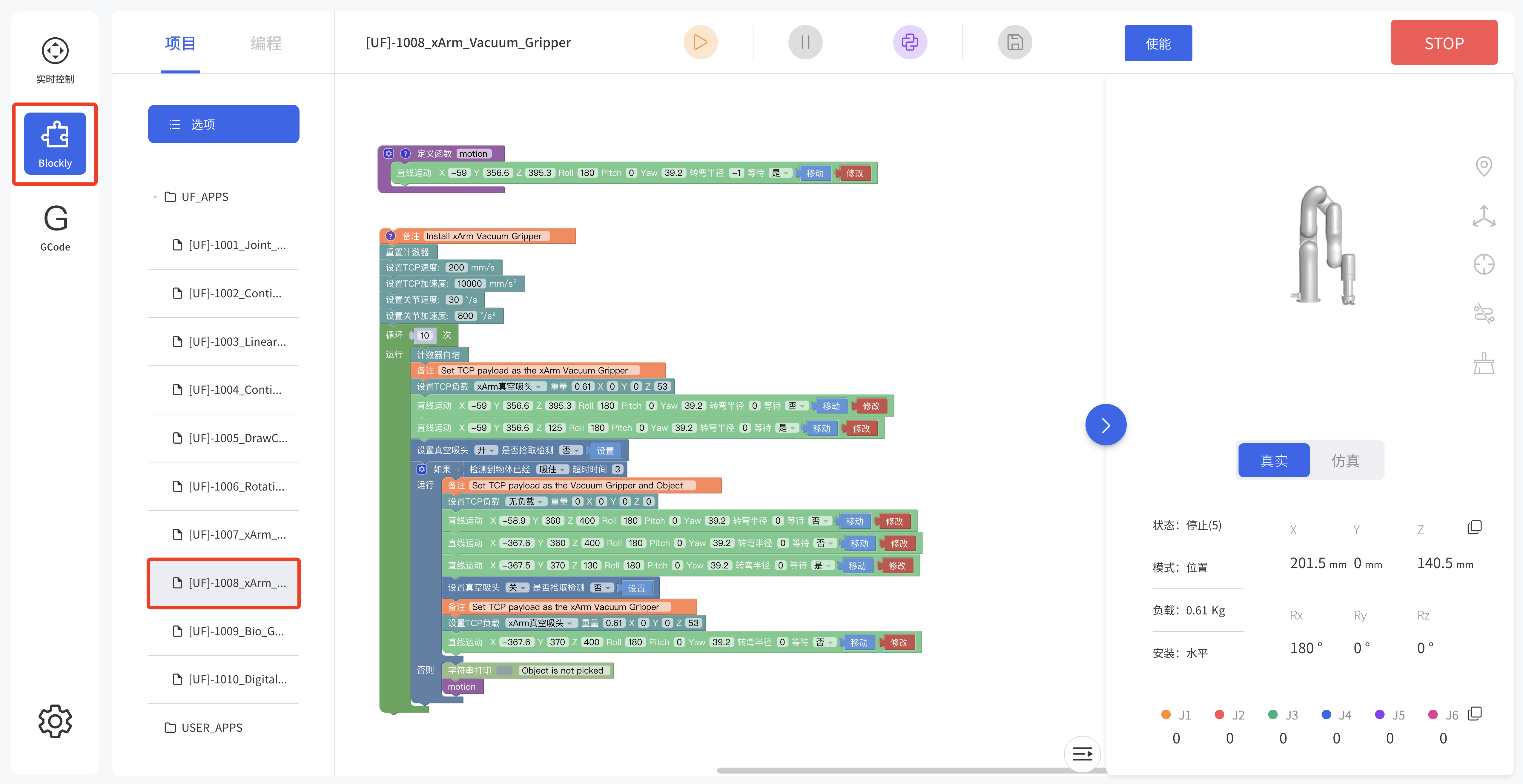
这段程序的作用:执行此程序,可控制真空吸头在指定位置吸取目标物,然后将目标物放到特定的位置。
注意:
1)当真空吸头安装到机械臂上时,在Blockly程序中应当设置TCP负载,当真空吸头吸取物体后,其重量发生变化,则需要设置新的TCP负载。
3.2Python-SDK 控制
真空吸头的使用接口:
arm.set_vacuum_gripper(True, wait=False) #开启真空吸头
arm.set_vacuum_gripper(False, wait=False) #关闭真空吸头Python-SDK下载地址: https://github.com/xArm-Developer/xArm-Python-SDK
3.3. ROS-SDK 控制
请参照ROS包中附带的ReadMe文件中的第5.7.8节来控制真空吸头的打开和关闭。
ROS-SDK下载地址: https://github.com/xArm-Developer/xarm_ros
3.4 UFACTORY私有TCP协议控制
本节主要阐述了如何通过调用xArm控制器的Modbus-TCP协议来控制xArm真空吸头。
3.4.1 私有TCP通信协议
Modbus-TCP: Modbus协议是一项应用层报文传输协议,有ASCII、RTU、TCP三种报文类型。标准Modbus协议物理层接口有RS232、RS422、RS485和以太网接口,采用master/slave方式通信。 真空吸头支持私有TCP协议,与标准Modbus TCP类似但不完全相同。
私有TCP通信过程:
- 建立TCP连接
- 准备私有TCP报文
- 使用send命令发送报文
- 在同一连接下等待应答
- 使用recv命令读取报文,完成一次数据交换
- 通信任务结束时,关闭TCP连接
参数: 默认TCP端口:502
协议标识:0x00 0x02 控制(当前只有这一个)
关于用户使用通信协议组织数据的大小端问题:
在本章节中,数据解析均为大端解析
3.4.2 私有TCP示例
- 打开/关闭真空吸头
可以通过发送下面的指令来控制真空吸头的打开和关闭。
| 打开真空吸头 | 00 01 00 02 00 08 7F 09 0A 15 00 80 80 4300 01 00 02 00 08 7F 09 0A 15 00 00 00 44 |
|---|---|
| 关闭真空吸头 | 00 01 00 02 00 08 7F 09 0A 15 00 00 80 4300 01 00 02 00 08 7F 09 0A 15 00 80 00 44 |
具体参数请参照下面的表格。
| 设置末端数字量输出 | ||||
|---|---|---|---|---|
| 寄存器:127 (0x7F) | ||||
| 请求指令格式 | ||||
| Modbus TCP 包头 | 事务标识 | 2 Bytes | u16 | 0x00,0x01 |
| 协议 | 2 Bytes | u16 | 0x00,0x02 | |
| 长度 | 2 Bytes | u16 | 0x00,0x08 | |
| 寄存器 | 1 Byte | u8 | 0x7F | |
| 参数 | 主机ID | 1 Byte | u8 | 0x09 |
| 寄存器起始地址 | 2 Bytes | u16 | 0x0A,0x15 | |
| 参数1(打开0)数据256.0:关闭0;257.0:打开0;512.0:关闭1;514:打开1 | 4 Bytes | fp32 | 0x00,0x80,0x80,0x43 | |
| 响应指令格式 | ||||
| Modbus TCP 包头 | 事务标识 | 2 Bytes | u16 | 0x00,0x01 |
| 协议 | 2 Bytes | u16 | 0x00,0x02 | |
| 长度 | 2 Bytes | u16 | 0x00,0x02 | |
| 寄存器 | 1 Byte | u8 | 0x7F | |
| 参数 | 状态 | 1 Byte | u8 | 0x00 |
- 获取真空吸头的状态
获取真空吸头状态的步骤见下表:
可以通过发送下面的请求指令来获取真空吸头的状态。
| 获取状态(请求指令) | 00 01 00 02 00 04 80 09 0A 14 |
|---|---|
| 获取状态(响应指令) (真空吸头已吸取物体) | 00 01 00 02 00 06 80 00 00 00 00 01 |
| 获取状态(响应指令) (真空吸头未吸取物体) | 00 01 00 02 00 06 80 00 00 00 00 00 |
具体参数请参照下面的表格。
| 获取末端数字量输入 | ||||
|---|---|---|---|---|
| 寄存器:128 (0x80) | ||||
| 请求指令格式 | ||||
| Modbus TCP 包头 | 事务标识 | 2 Bytes | u16 | 0x00,0x01 |
| 协议 | 2 Bytes | u16 | 0x00,0x02 | |
| 长度 | 2 Bytes | u16 | 0x00,0x04 | |
| 寄存器 | 1 Byte | u8 | 0x80 | |
| 参数 | 主机ID | 1 Byte | u8 | 0x09 |
| 寄存器起始地址 | 2 Bytes | u16 | 0x0A,0x14 | |
| 响应指令格式 | ||||
| Modbus TCP 包头 | 事务标识 | 2 Bytes | u16 | 0x00,0x01 |
| 协议 | 2 Bytes | u16 | 0x00,0x02 | |
| 长度 | 2 Bytes | u16 | 0x00,0x06 | |
| 寄存器 | 1 Byte | u8 | 0x80 | |
| 参数 | 状态 | 1 Byte | u8 | 0x00 |
| 参数1(0)最末端字节,表示输入状态。第0位对应输入0,第1位对应输入1。 | 4 Bytes | u8*4 | 0x00,0x00,0x00,0x00 |