2.安装
2.1 发货清单
六维力矩传感器套件通常包括以下物品(实际发货请参考发货清单中勾选的物件):
- 六维力矩传感器*1
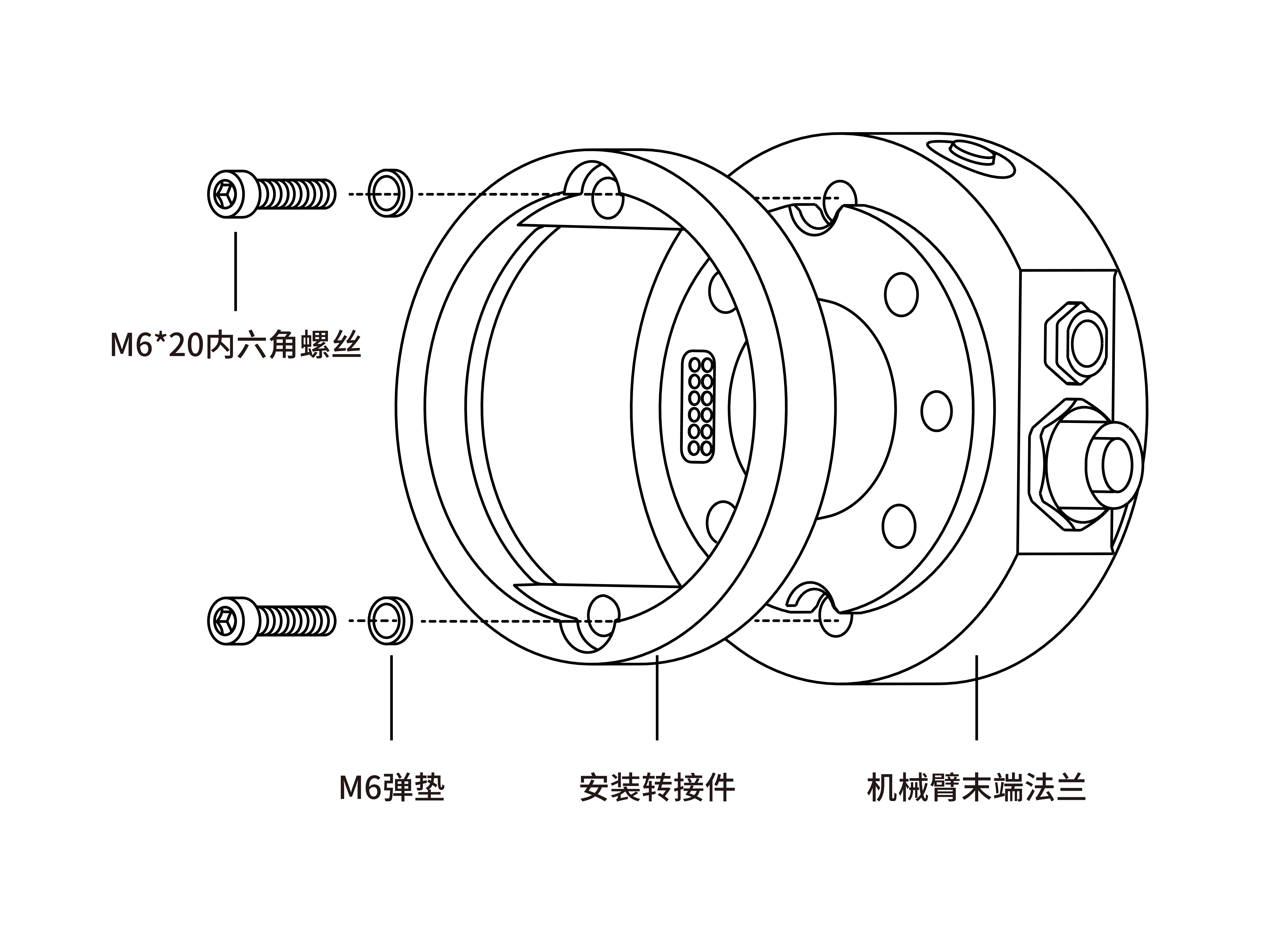
- 安装转接件*1
- 1300安装转接件*1
- 1300转接线*1
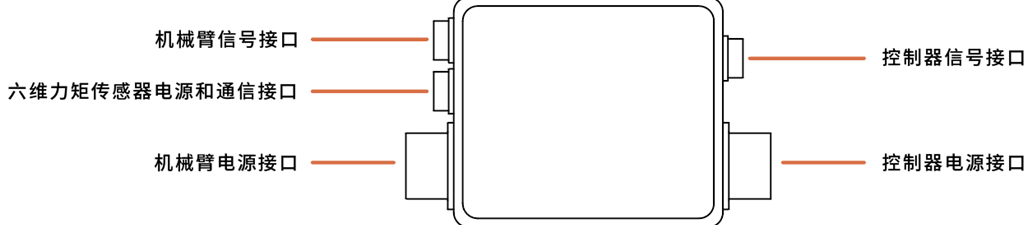
- 六维力矩传感器转接盒*1
- 机械臂供电电缆*1
- 机械臂通信电缆*1
- M6*20 内六角螺丝(2个)和M6 弹垫(2个)
- M6*16 内六角螺丝(2个)和M6 弹垫(2个)
- M4*8 内六角螺丝(4个)和M4弹垫(4个)
- 魔术贴(3米)
- 2.5MM 和 5MM L型扳手*1
2.2 机械安装
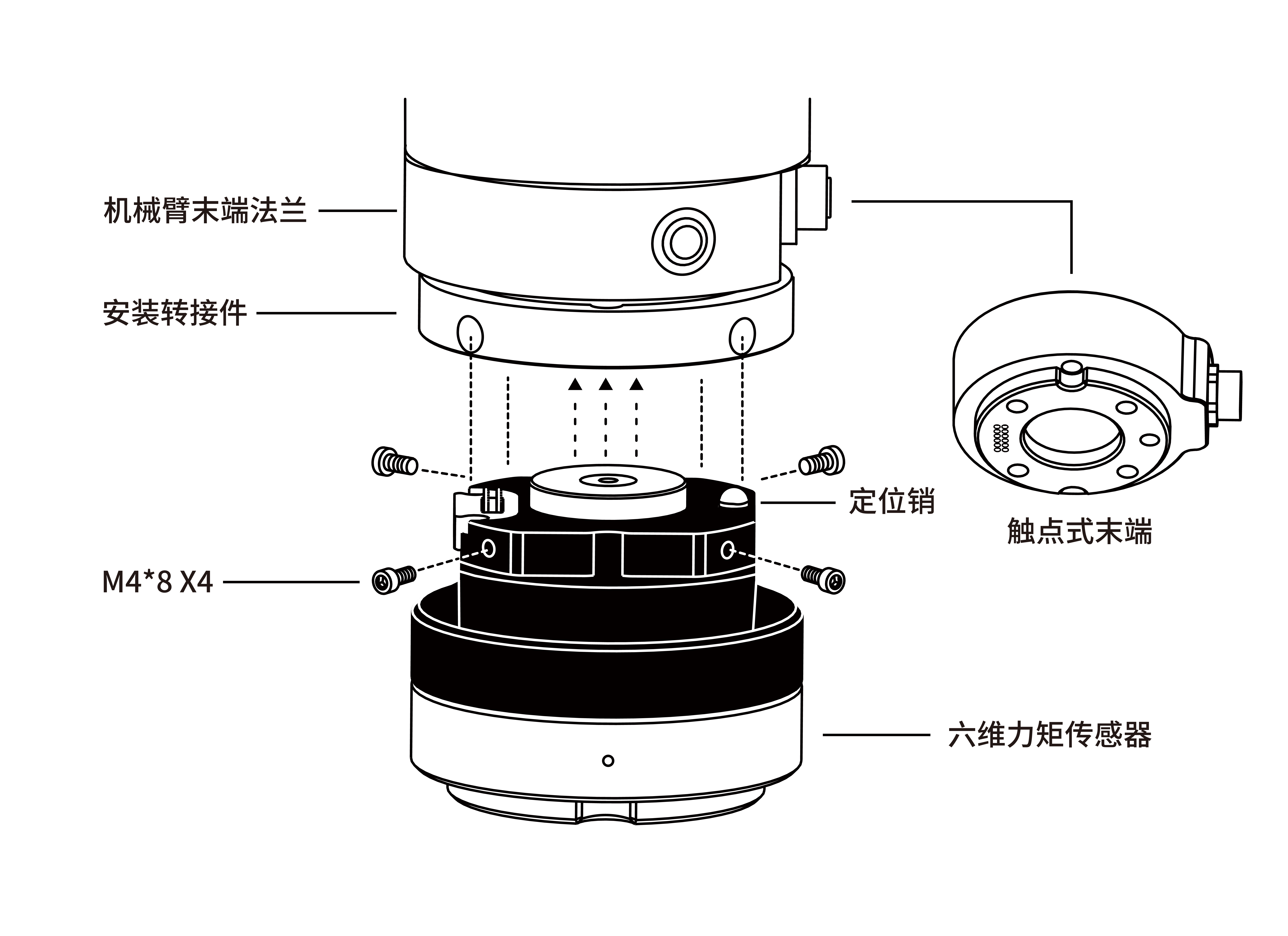
2.2.1 触点式末端(UF850, XX1305)
适用产品:xArm1305系列,UFactory 850
- 按下控制器上的急停按钮。
- 用4颗M6*20螺丝(一定要加弹垫)将六维力矩传感器安装转接件安装在末端法兰上。
- 用4颗M4*8螺丝(一定要加弹垫)将六维力矩传感器固定在安装转接件上。
- 松开控制器上的急停按钮。
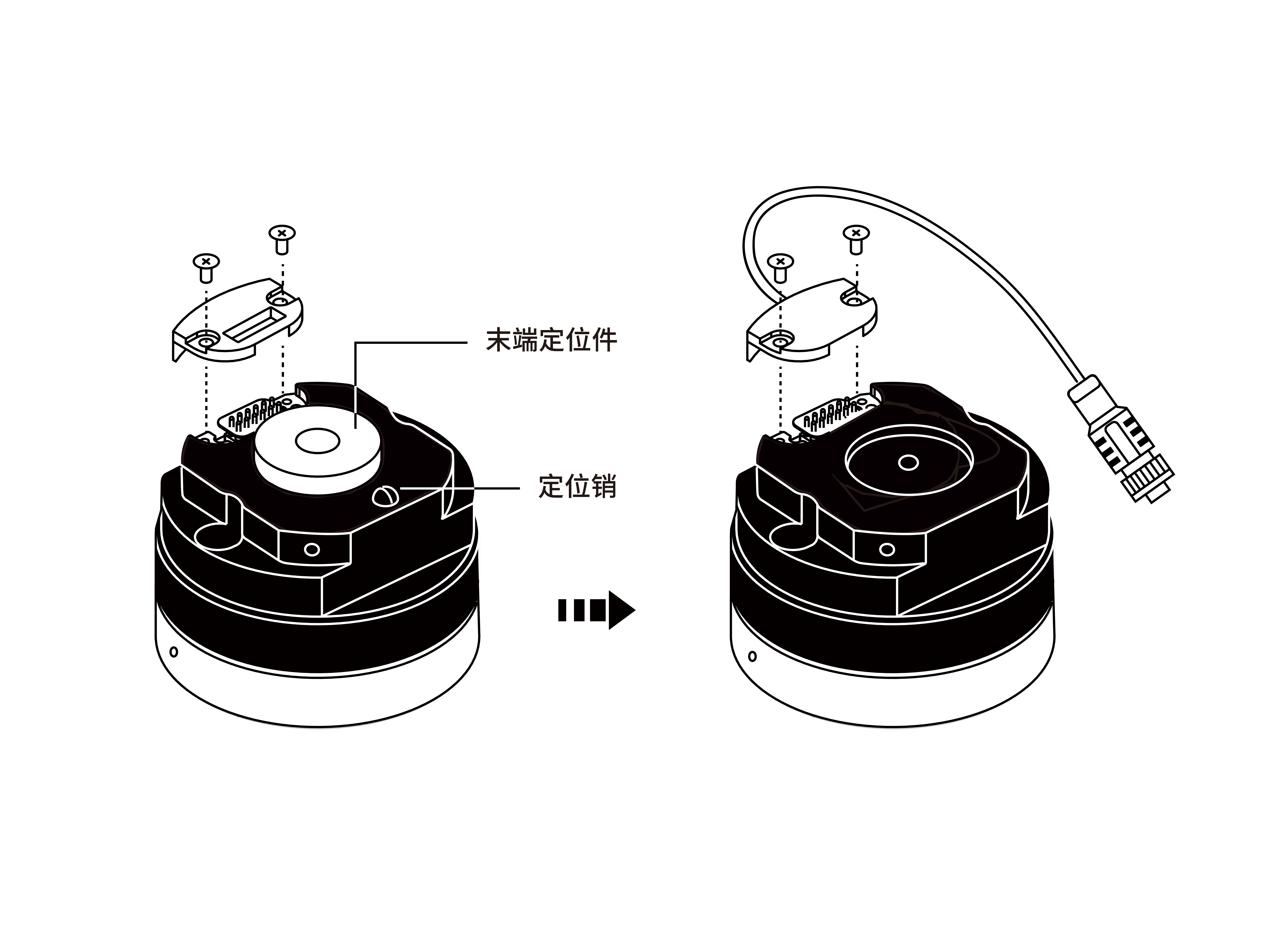
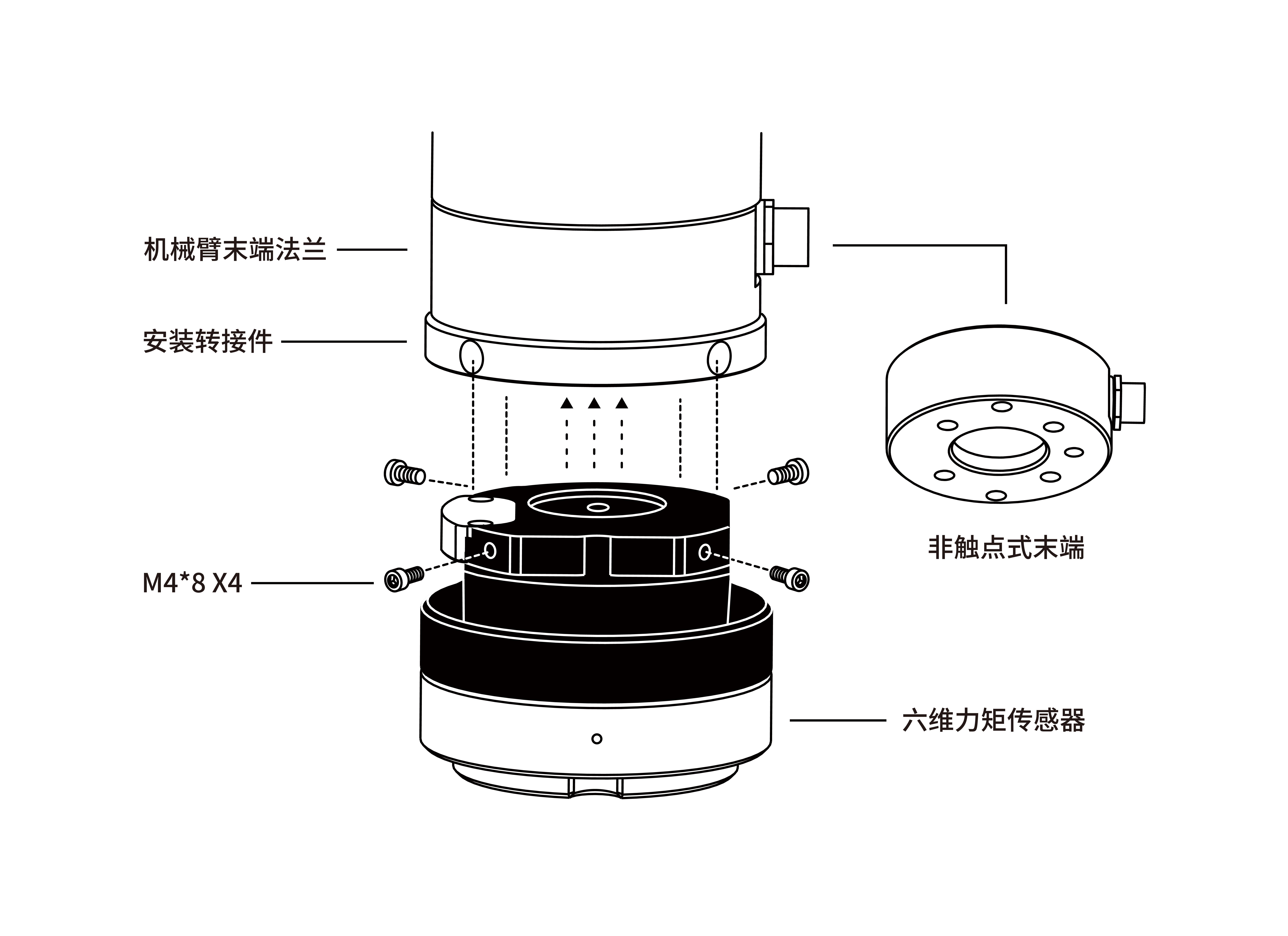
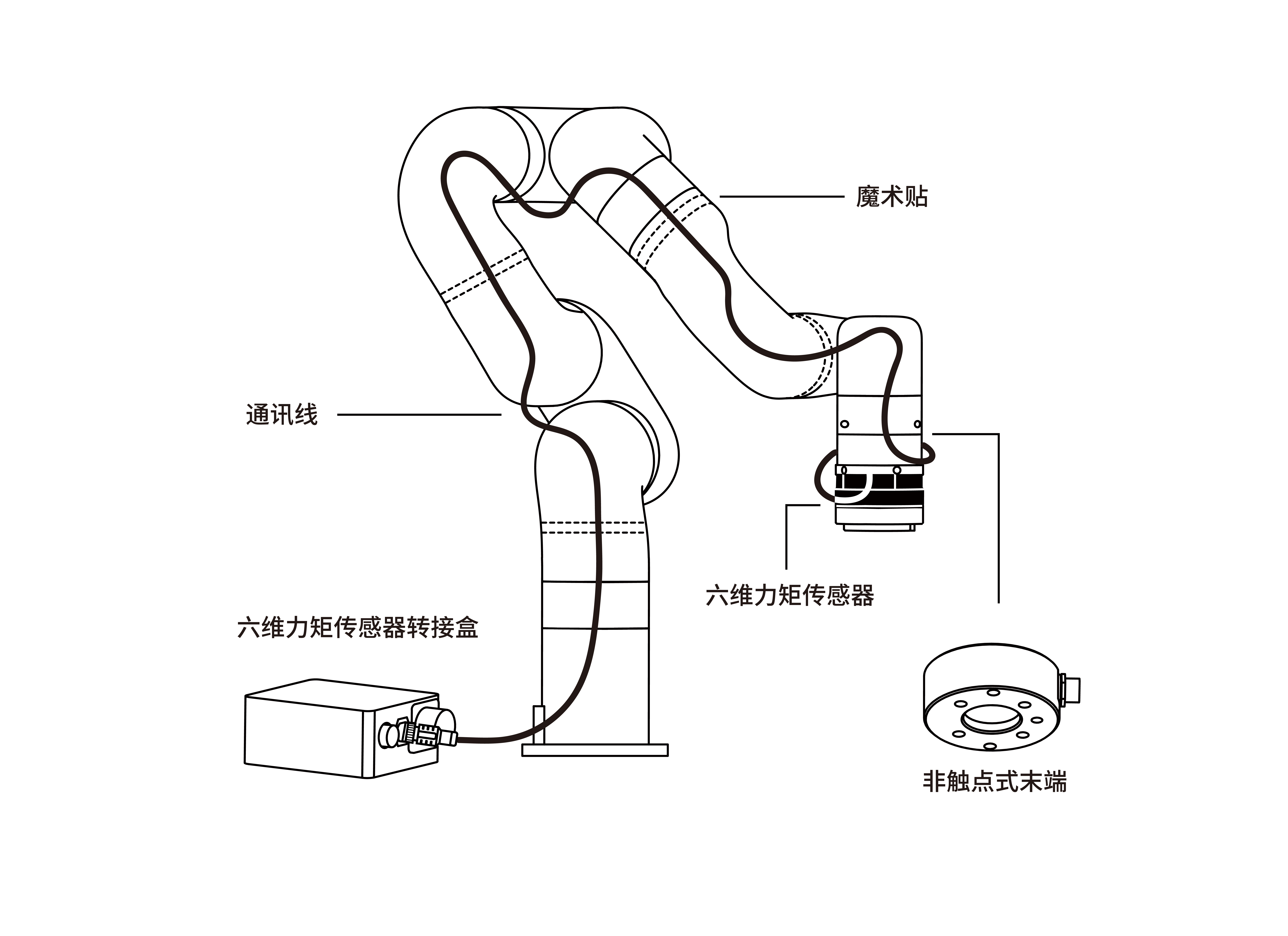
2.2.2 非触点式末端(XX1304或以下)
适用产品:xArm系列 1304 或 以下版本
- 按下控制器上的急停按钮。
- 将六维力矩传感器法兰面两颗螺丝拧开,取下黑色盖板,替换带通讯线的转接盖板。将定位销取下,将末端定位件取下。
- 用4颗M6*16螺丝(一定要加弹垫)将六维力矩传感器安装转接件安装在末端法兰上。
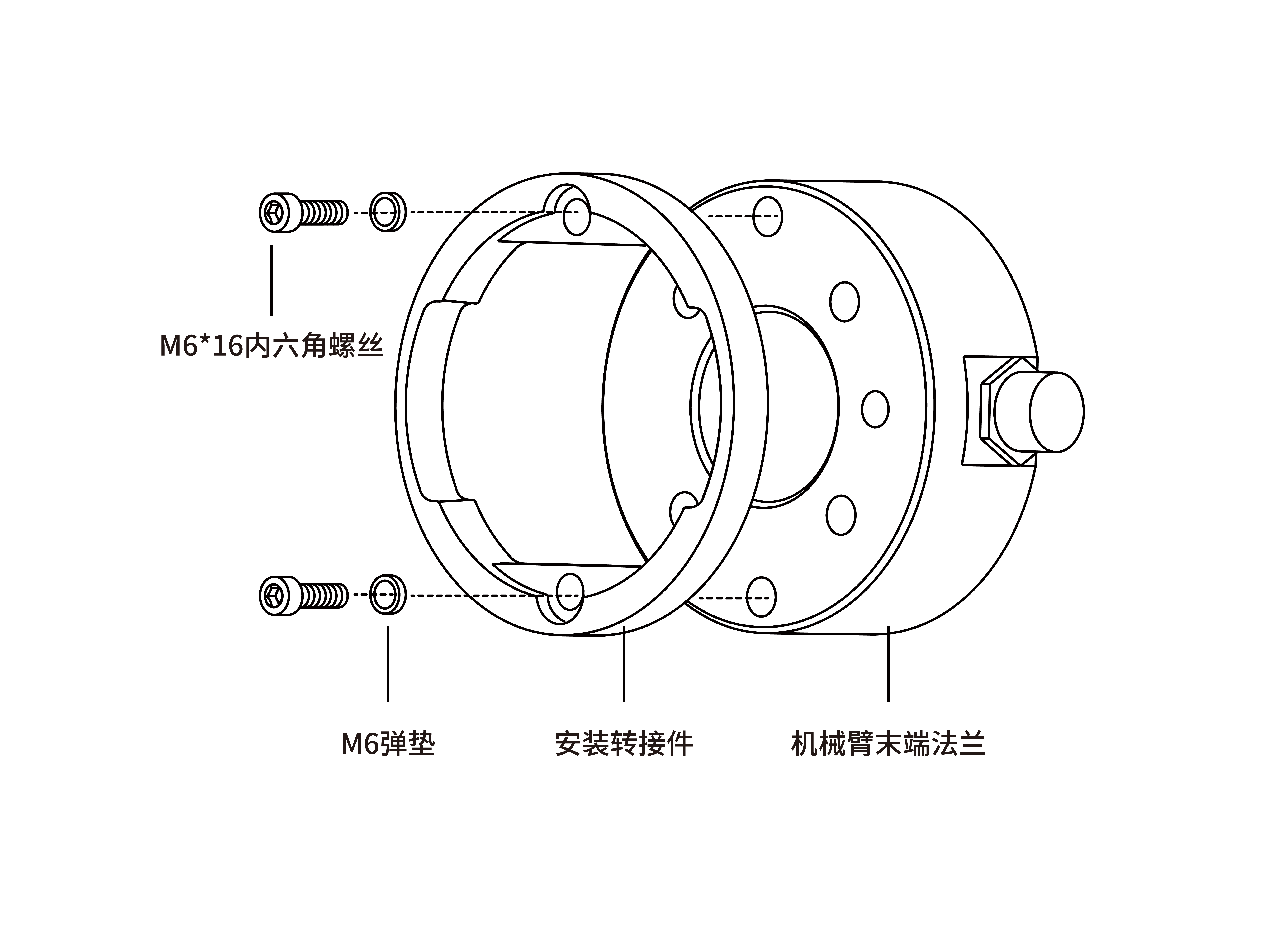
- 用4颗M4*8螺丝(一定要加弹垫)将六维力矩传感器固定在安装转接件上。
- 将六维力矩通讯线接到力矩转接盒的通讯线接口上。
注意: 连接所有线缆时控制器上的急停开关一定要处于按下状态,机械臂电源指示灯熄灭,避免热插拔引起机械臂故障;
2.3 电气设置
2.3.1 触点式末端
通过机械臂末端24v直流供电和IO控制,具体引脚功能请参考下图。
六维力矩使用24V,GND, R_A, R_B, 功率小于2.5W。 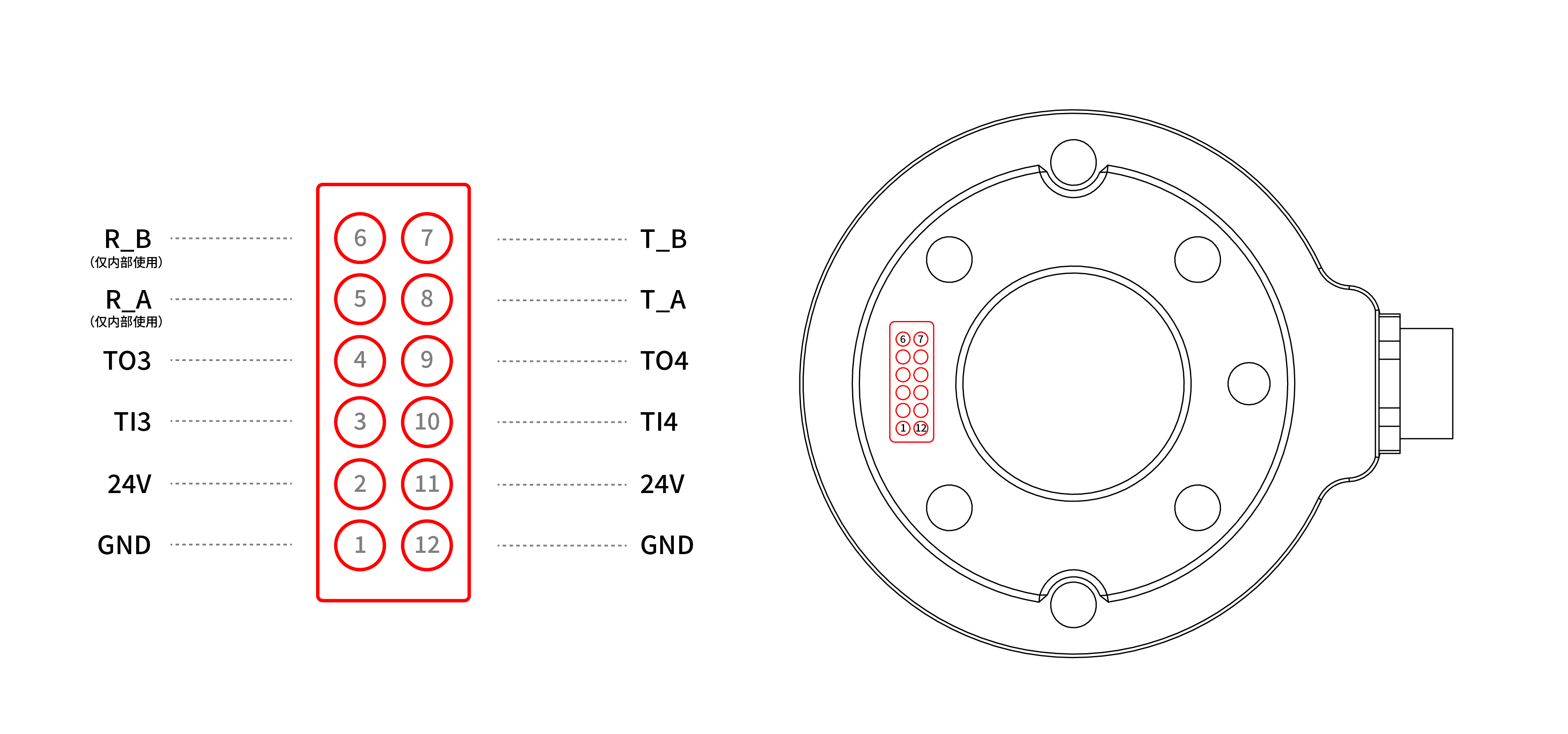
2.3.2 六维力矩转接盒
针对xArm 1304 或 以下 版本手臂,需要此转接盒。