3.控制方式
3.1 UFACTORY Studio 控制
3.1.1 基础设置
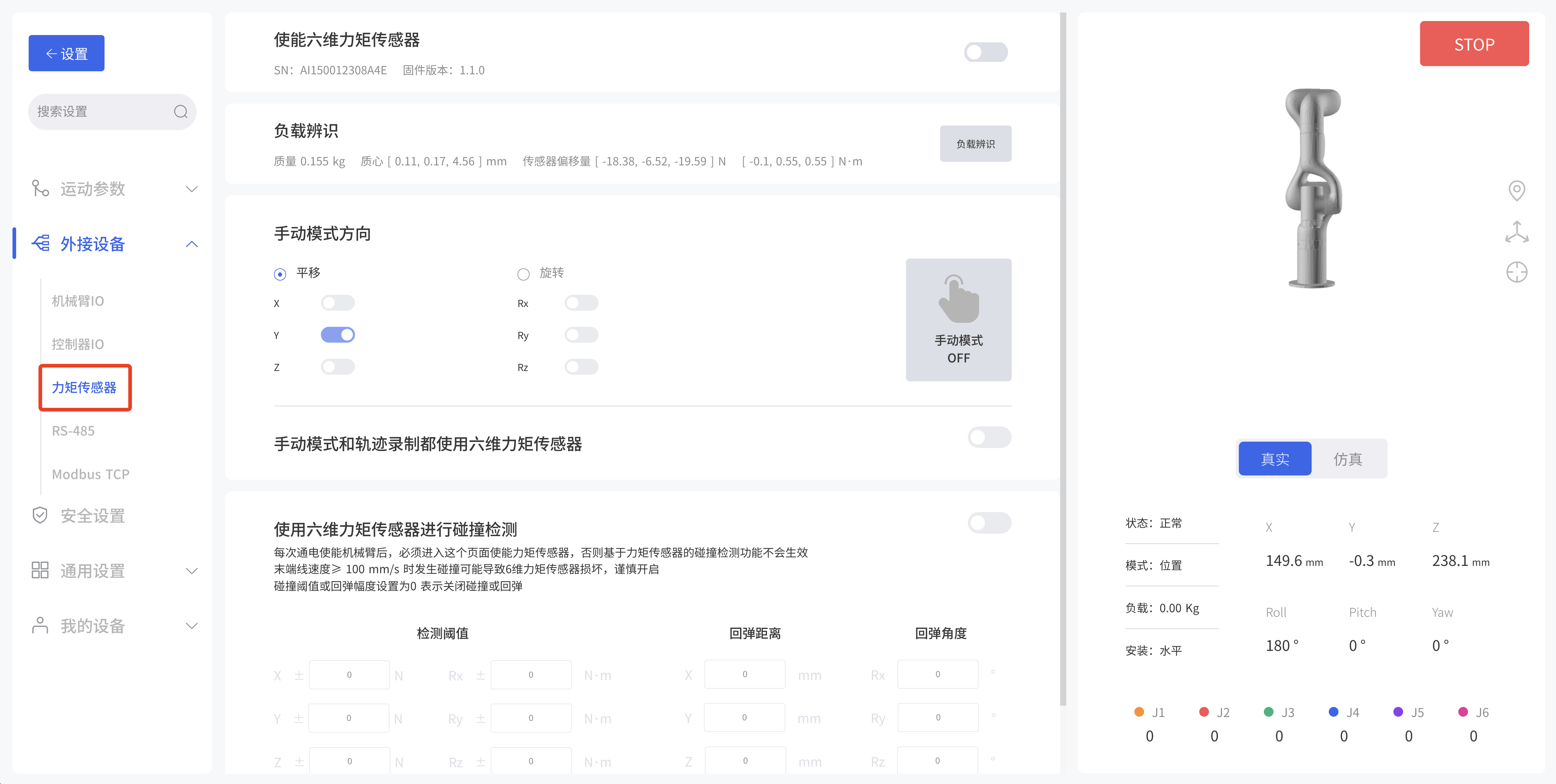
- 使能六维力矩传感器:使能,获取并显示SN和固件版本。
- 负载辨识:负载辨识过程中,机械臂将会执行一系列动作,大约5分钟。结束后自动显示质量,质心和传感器偏移量并应用。
- 手动模式方向:可选择平移或旋转方向,开启后激活即可打开力矩手动模式。
- 手动模式和轨迹录制都使用六维力矩传感器
- 使用六维力矩传感器进行碰撞检测:可设置检测阈值、回弹距离、回弹角度。
3.1.2 Blockly

设置力传感器力控制:可编程参数如下 坐标系:基坐标、工具坐标
可选方向:Fx, Fy, Fz, Tx, Ty, Tz 大小:-105~105N(Fx, Fy, Fz) ; -2.8~2.8N(Tx, Ty, Tz) 持续时间:0-9999秒读取力矩传感器的值:可编程参数如下 可选方向:Fx, Fy, Fz, Tx, Ty, Tz
3.1.3 数据观测
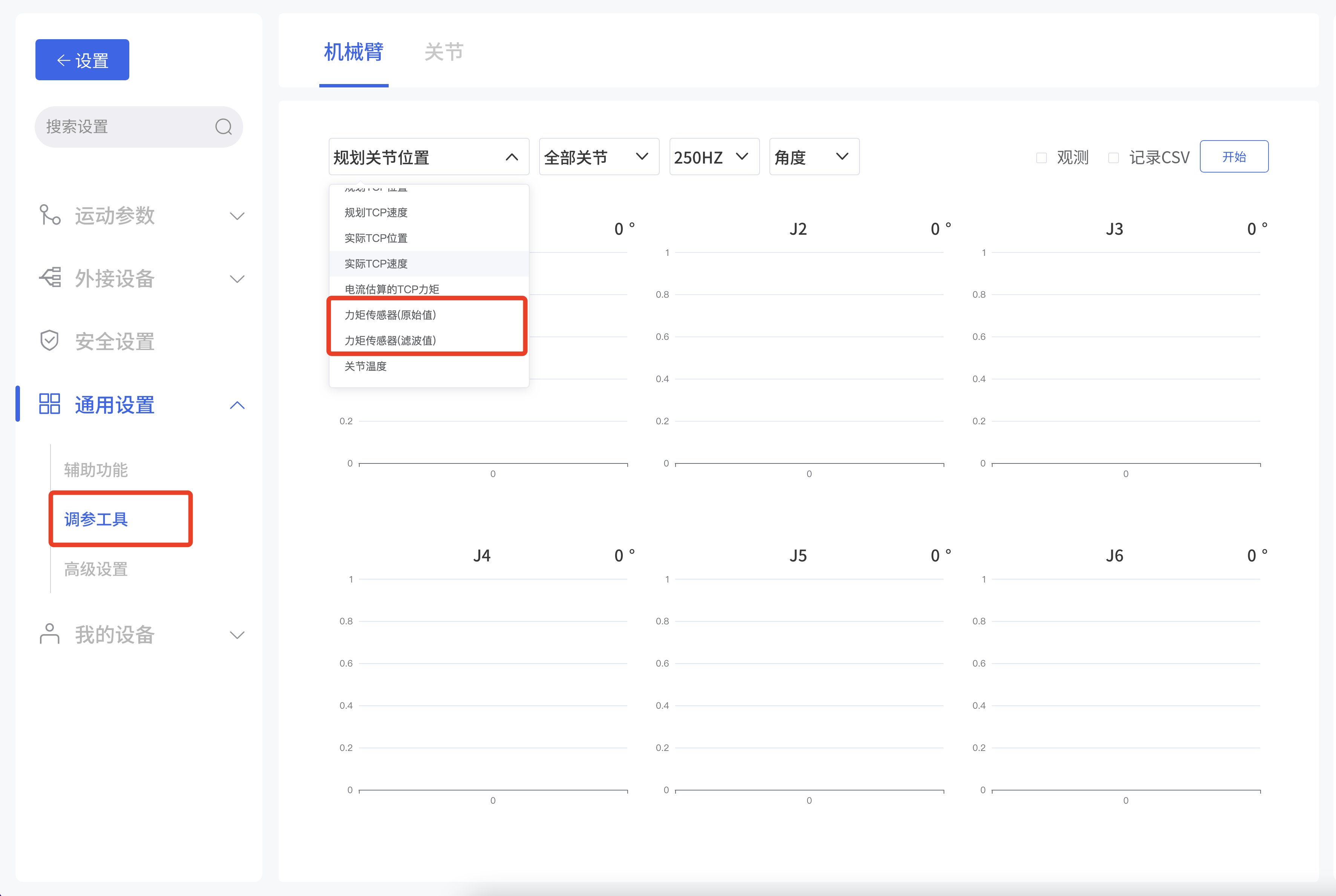
进入设置 - 通用设置 - 调参工具 - 机械臂界面,勾选观测或记录CSV,点击开始,通过TCP端口上报获得数据并绘图。
可选参数:
- 观测值:力矩传感器(原始值),力矩传感器(滤波值)
- 观测关节:全部关节,单关节
- 频率:200HZ,5HZ
- 单位:角度,弧度
3.2 Python SDK 控制
对于使用Python-SDK控制六维力矩传感器的详细内容请见点击下面的链接查看:
https://github.com/xArm-Developer/xArm-Python-SDK/tree/master/example/wrapper/common
参考example:8000-8010
常用接口: ft_sensor_enable: 使能六维力矩传感器 iden_ft_sensor_load_offset:力矩传感器的负载辨识 set_ft_sensor_load_offset:将力矩传感器负载辨识结果设为0点 set_ft_sensor_mode:设置力控模式(0:非力控, 1:导纳控制, 2:力位混合控制) get_ft_sensor_data:获取补偿和滤波后的力矩传感器数据 set_ft_sensor_admittance_parameters:设置导纳控制参数(M,B,K),参考坐标系,柔顺轴 set_ft_collision_detection:设置基于力矩传感器的碰撞检测 set_ft_collision_rebound:设置碰撞后是否回弹
3.3 用C++ SDK 控制六维力矩传感器
对于使用C++ SDK控制六维力矩传感器的详细内容请见点击下面的链接查看:
https://github.com/xArm-Developer/xArm-CPLUS-SDK/tree/master/example
参考example:8000-8010