3. Control Methods
Programmable Parameters:
- Position: 0-840mm;
- Speed: 15-225mm/s;
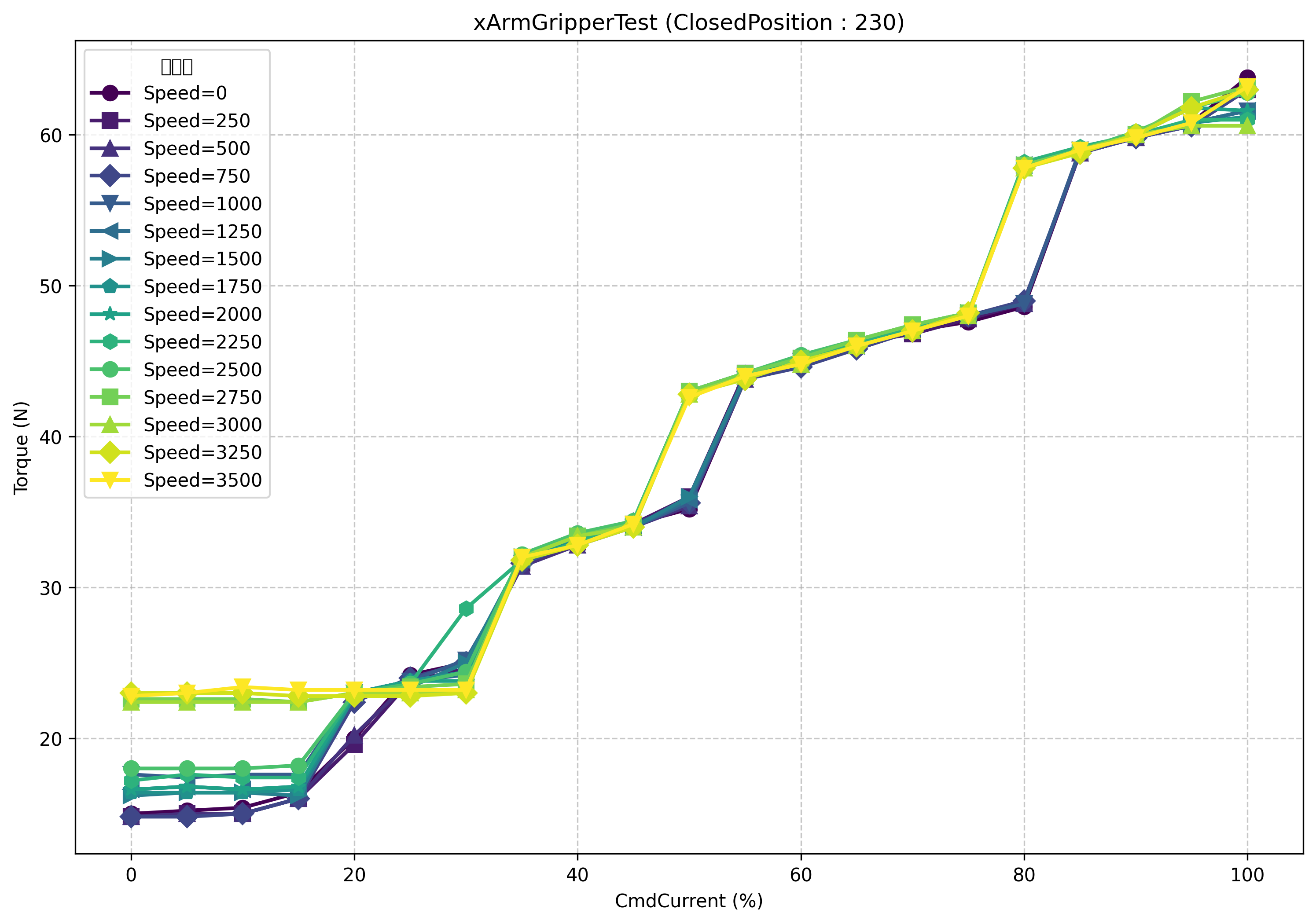
- Force: 1-100 (percentage), The force setting value is expressed as a percentage, so refer to the following chart for the corresponding actual force.
3.1 UFACTORY Studio
3.1.1 Live Control
Enter the Live control page, select Gripper G2, and perform position control (range 0-840).
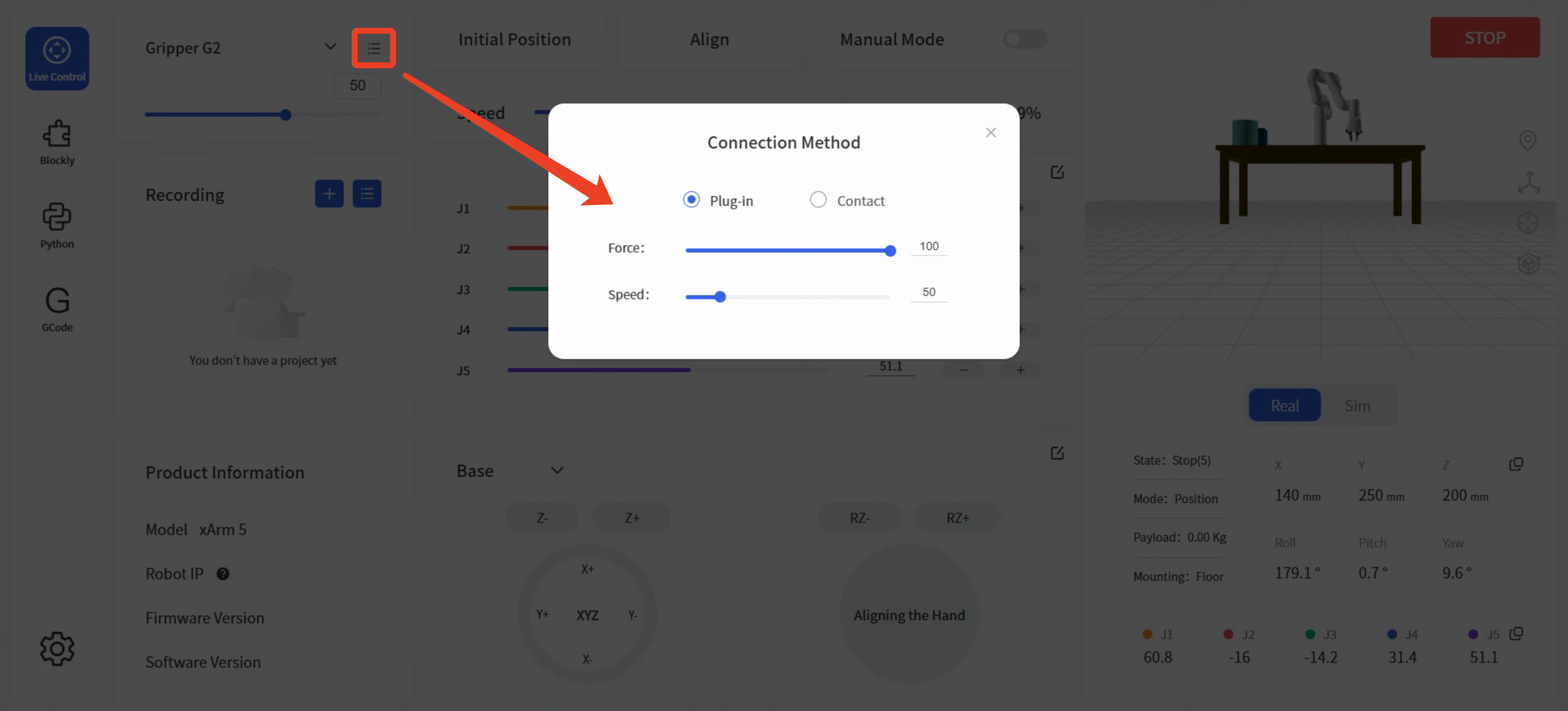
Click the button in the upper right corner to select connection mode and adjust gripping force/speed.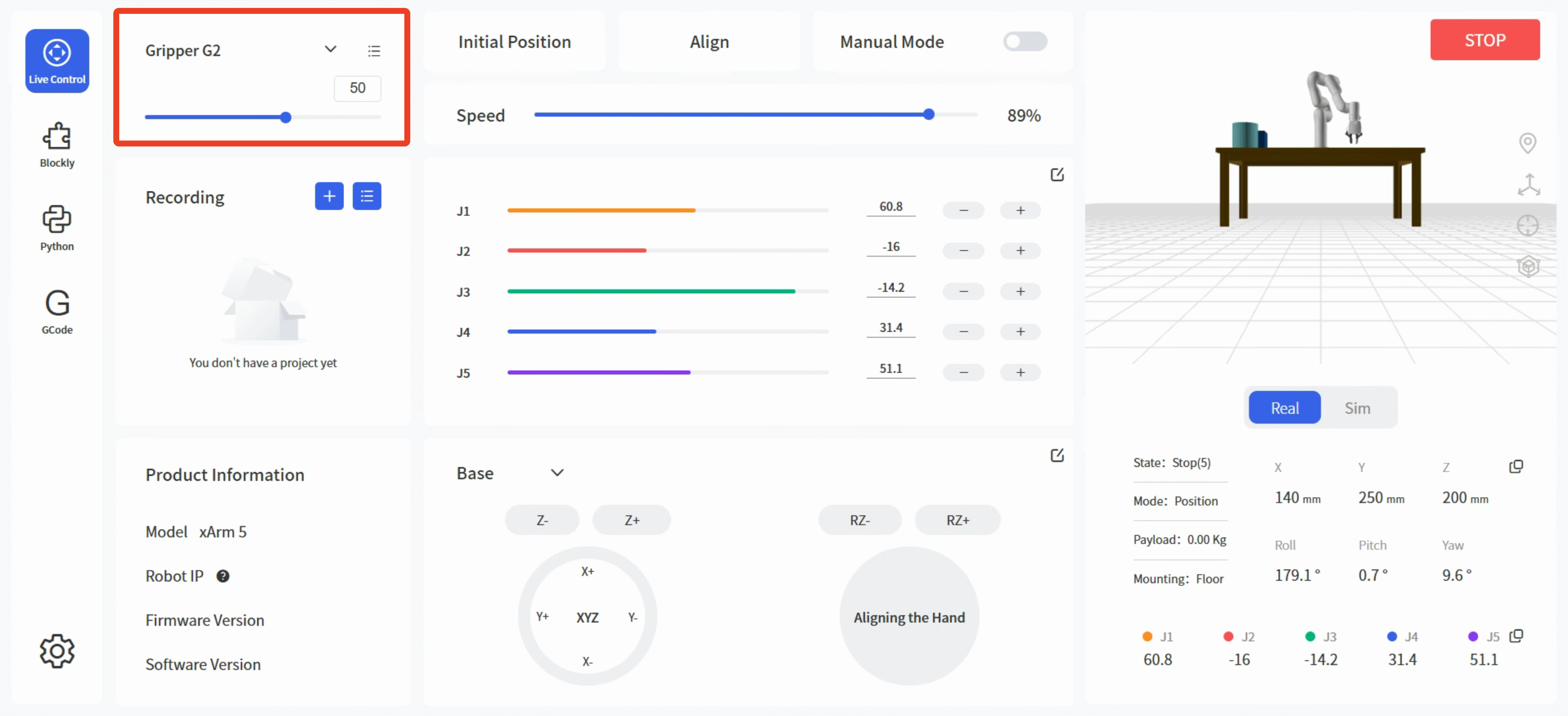
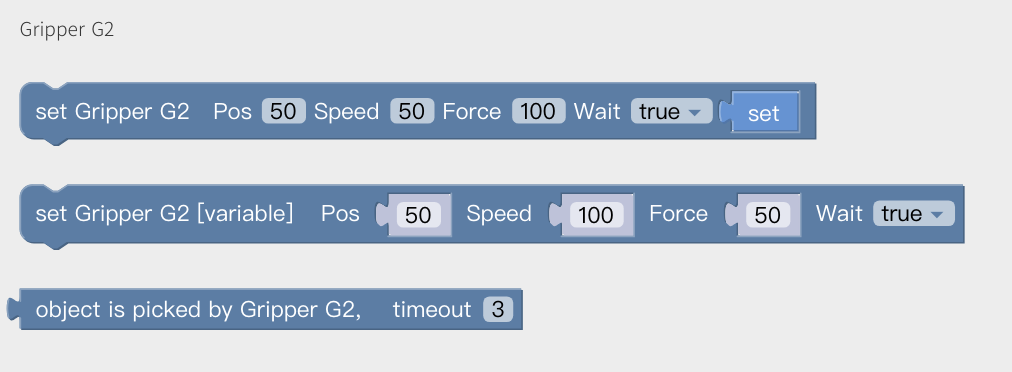
3.1.2 Blockly Control
Blockly provides 3 blocks for Gripper G2 control:
- Set Gripper G2 pos[] speed[] force[] wait[]
- Set Gripper G2 [variable] pos[] speed[] force[] wait[]
- Object gripped by Gripper G2 timeout[]
3.1.3 Modbus RTU Control
Go to Settings -> External Devices -> RS485, select Modbus RTU protocol, and send corresponding commands.
Refer to Chapter 4: Modbus RTU Protocol for details.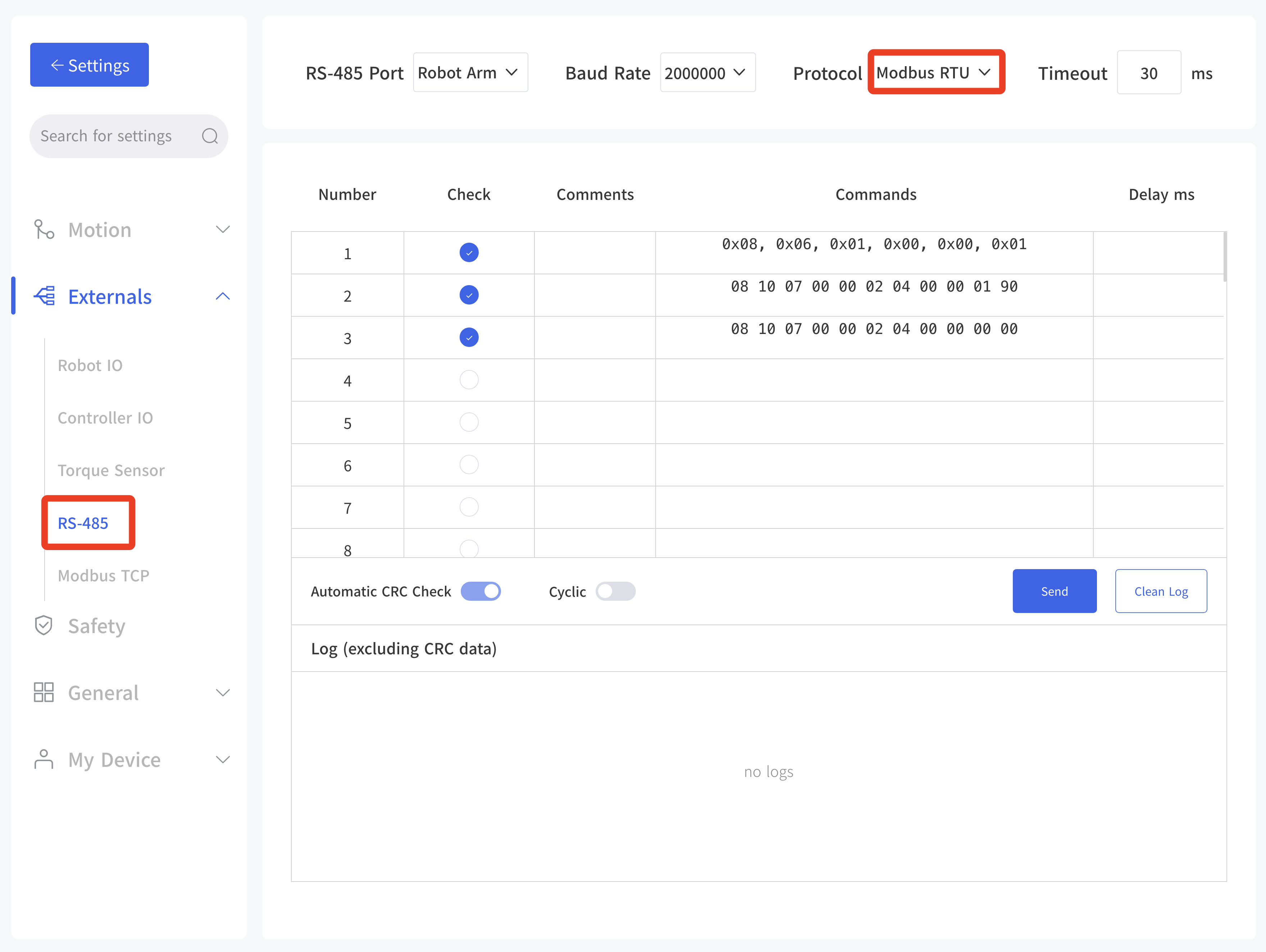
3.1.4 UFACTORY Private TCP Control
Go to Settings -> External Devices -> Modbus TCP, select 'UFACTORY Private TCP', and send proprietary TCP commands.
Refer to Appendix for UFACTORY Private TCP details.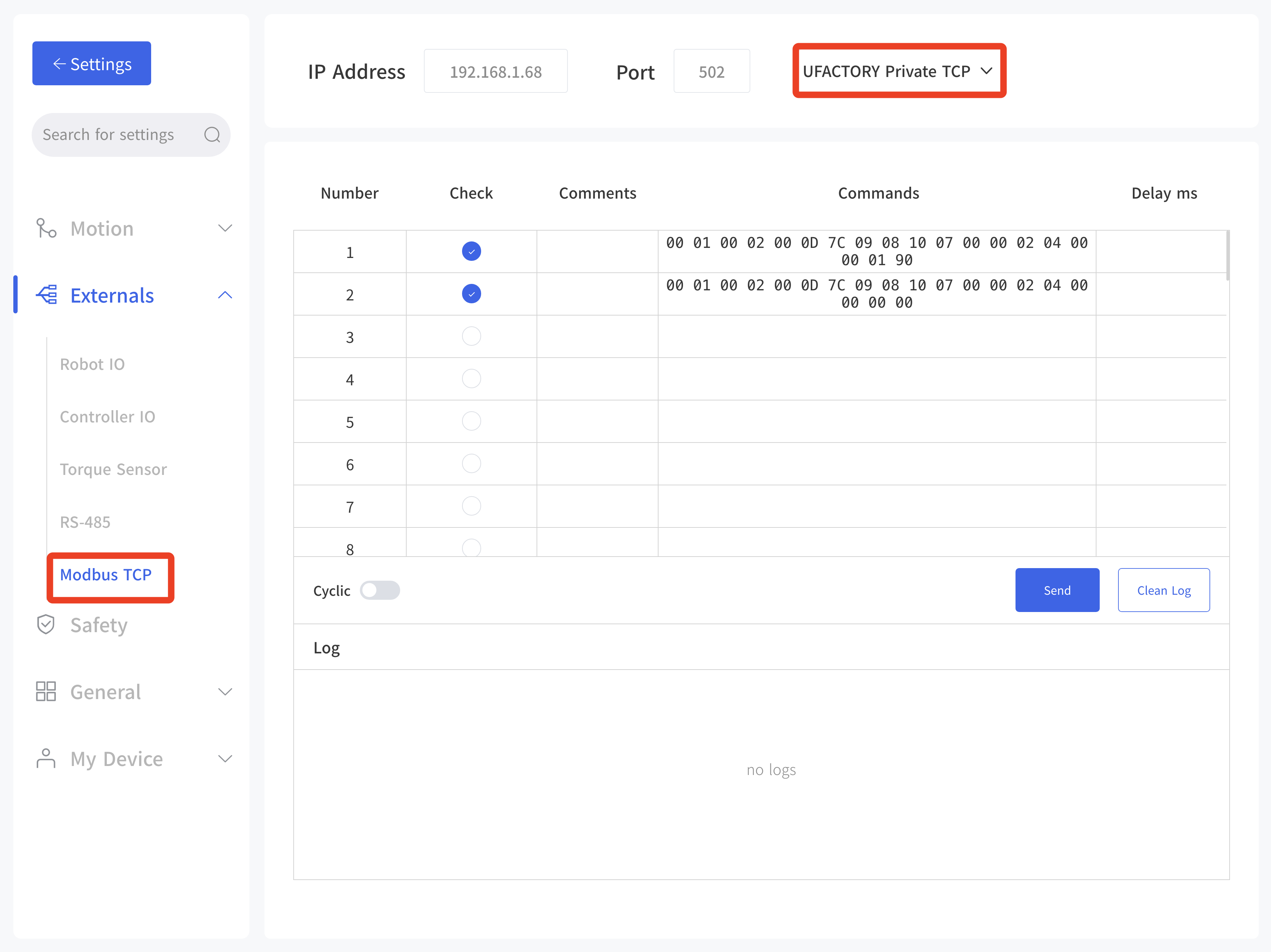
3.2 Python SDK
Common interfaces (Python SDK ≥ 1.16.0):set_gripper_g2_position: Set Gripper G2 position, force, and speedget_gripper_g2_position: Get current Gripper G2 position
Python example:
import os
import sys
sys.path.append(os.path.join(os.path.dirname(__file__), '../../..'))
from xarm.wrapper import XArmAPI
arm = XArmAPI('192.168.1.68')
arm.motion_enable(enable=True)
arm.set_mode(0)
arm.set_state(state=0)
code = arm.set_gripper_enable(True)
print('set gripper enable, code={}'.format(code))
code = arm.set_gripper_g2_position(80, wait=True, speed=200, force=80)
print('set gripper, code={}'.format(code))
print('position=', arm.get_gripper_g2_position())