5. Errors and Handling
5.1 Error Codes
| Software Error Code | Alarm Code | Handling Instructions |
|---|---|---|
| G9 | 0x09 | Gripper current detection abnormal. Restart arm via emergency stop button. |
| G11 | 0x0B | Gripper overcurrent. Click "Confirm" to re-enable gripper. |
| G12 | 0x0C | Gripper overspeed. Click "Confirm" to re-enable gripper. |
| G14 | 0x0E | Position command too large. Click "Confirm" to re-enable gripper. |
| G15 | 0x0F | Gripper EEPROM R/W error. Click "Confirm" to re-enable gripper. |
| G20 | 0x14 | Driver IC hardware error. Click "Confirm" to re-enable gripper. |
| G21 | 0x15 | Driver IC initialization error. Click "Confirm" to re-enable gripper. |
| G23 | 0x17 | Excessive position deviation. Check for obstructions. If clear, click "Confirm" to re-enable. |
| G25 | 0x19 | Command exceeds software limit. Verify position settings. |
| G26 | 0x1A | Feedback position exceeds software limit. |
| G33 | 0x21 | Driver overload. |
| G34 | 0x22 | Motor overload. |
| G36 | 0x24 | Driver type error. Click "Confirm" to re-enable gripper. |
For alarm codes not listed above: Re-enable the robotic arm and gripper. Contact technical support if errors persist.
5.2 Error Handling
5.2.1 Clearing Errors via UFACTORY Studio
- Power cycle the robotic arm using the emergency stop button on controller.
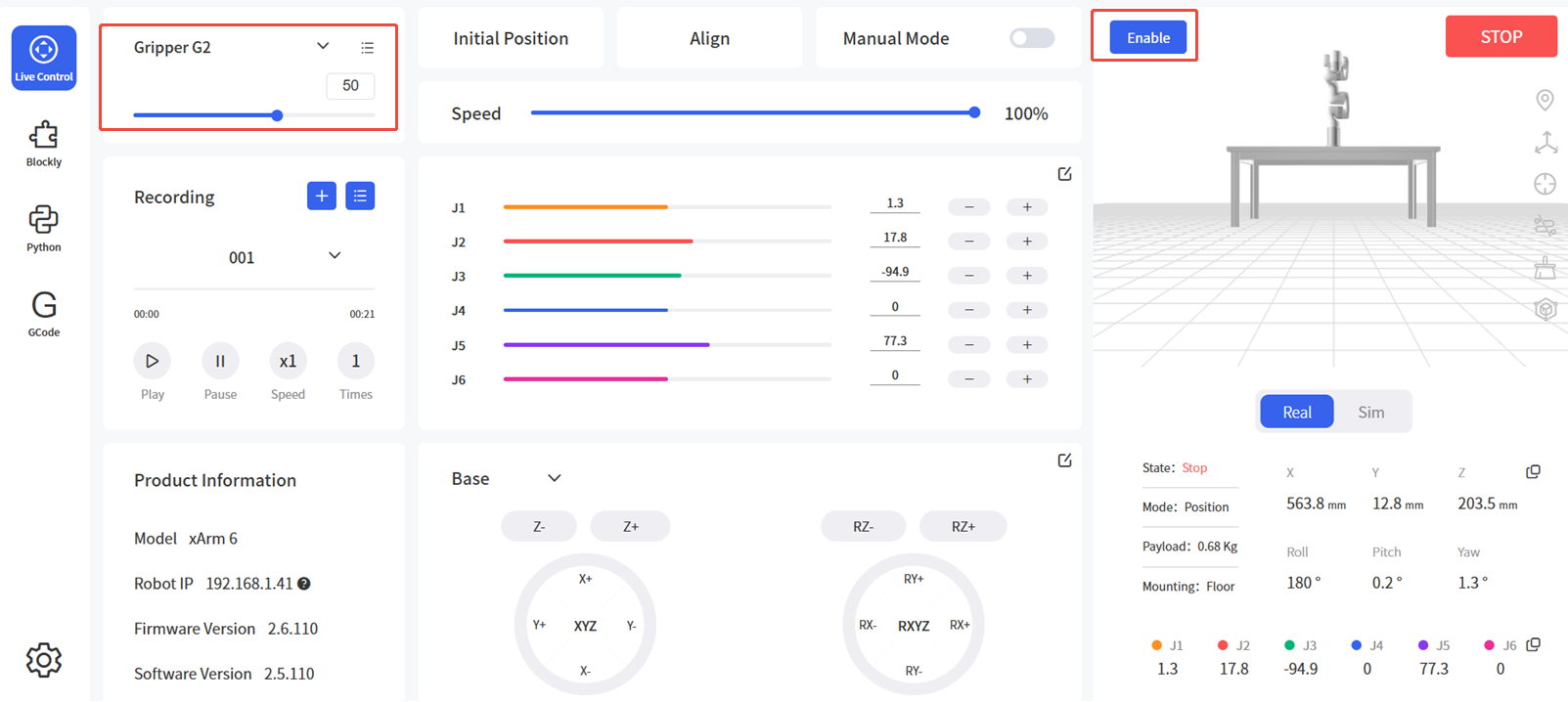
- Enable the arm: Click the guide button in the error popup or the enable button on Live Control page.
- Select Gripper G2 and control.
5.2.2 Clearing Errors via xArm-Python-SDK
Clearing steps: (Python-SDK API)
- Power cycle robotic arm using emergency stop button
- Clear errors:
clean_error() - Re-enable arm:
motion_enable(enable=True) - Set motion mode:
set_mode(0) - Set motion state:
set_state(0) - Enable Gripper G2:
set_gripper_enable(enable=True)
Python example:
python
import os
import sys
import time
sys.path.append(os.path.join(os.path.dirname(__file__), '../../..'))
from xarm.wrapper import XArmAPI
arm = XArmAPI('192.168.1.68')
arm.clean_error() # Clear errors
arm.motion_enable(enable=True) # Re-enable robotic arm
arm.set_mode(0) # Set motion mode
arm.set_state(0) # Set motion state
arm.set_gripper_enable(True) # Enable Gripper G2